科技瞭望臺:更高階的自動駕駛用到了這些技術
2025-05-04 15:56:27 1
上個月,一段搭載華為自動駕駛ADS系統的極狐量產電動車路試視頻走紅網絡,視頻中展示該車在極為複雜的路況下仍舊能實現自動駕駛功能,車輛所實現的更高階自動駕駛成為了核心關注點。
在眾多廠商入局的電動車行業,自動駕駛很可能會成為未來電動車的核心競爭力之一。目前自動駕駛技術都用到了哪些技術?未來自動駕駛技術會怎麼發展?自動駕駛技術有可能成為接下來電動車行業的焦點之一。
自動駕駛也有分級
我們先來了解下目前自動駕駛都有哪些類型。根據國際自動機工程師學會(SAE)劃分的標準,自動駕駛擁有從L0到L5五個級別。L0需要人類全程駕駛,車輛能夠提供有限的提醒,比如盲點監測提醒。L1能夠實現轉向或者加減速其中一項功能。L2則是有一定的自動化駕駛功能,同時支持轉向和加減速功能,而駕駛員需要完成其餘操作。
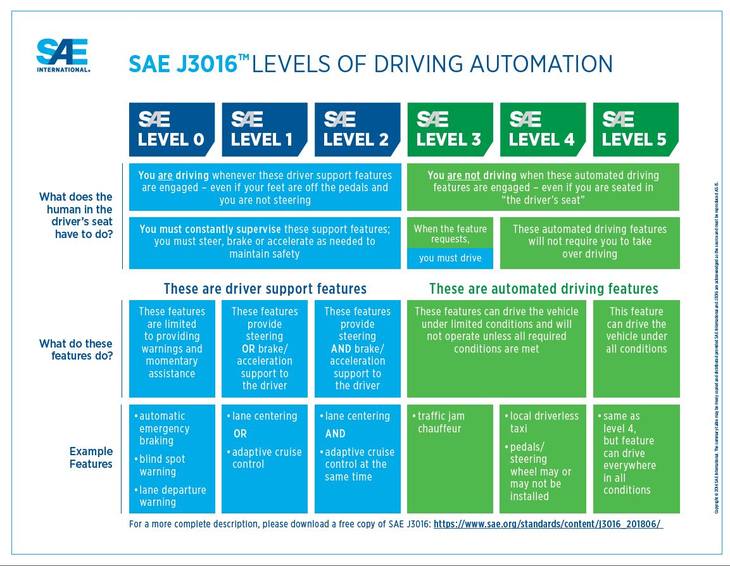
L3級別的自動駕駛與上面幾個級別完全不同,L3能夠實現條件自動駕駛,車輛完成駕駛操作,不過駕駛員仍舊需要關注路面動態,隨時準備接管。L4則是高度自動化駕駛,在限定道路和環境條件下,可以由自動駕駛完成所有操作。
簡單來說,L3級是自動駕駛的一個轉折點,帶來質的提升。目前有部分廠商對L3、L4級別的自動駕駛進行了嘗試,預計未來車輛所搭載的自動駕駛功能更多是L3級別以上。
從路測的情況看,搭載華為自動駕駛ADS系統的極狐電動車已經實現類似L4級別的自動駕駛。最近也有不少科技企業宣布涉足造車行業,在自動駕駛方面,科技企業可能會有更大優勢。
自動駕駛有視覺派&雷射雷達派
要想實現自動駕駛,車輛需要具備環境感知能力。在車輛環境感知層面,目前技術路線大概可以分為視覺派和雷射雷達派兩種不同路線,這兩種路線都會採用多傳感器混合感知方案,只不過核心實現形式有所區別。
視覺派自動駕駛主要以攝像頭視覺識別為主,攝像頭+毫米波雷達就是很常見的組合方案。通過攝像頭識別物體、場景,毫米波雷達負責提供距離、速度等參數,通過這些傳感器組合捕捉到車輛位置以及外部環境信息,共同實現車輛的感知能力。
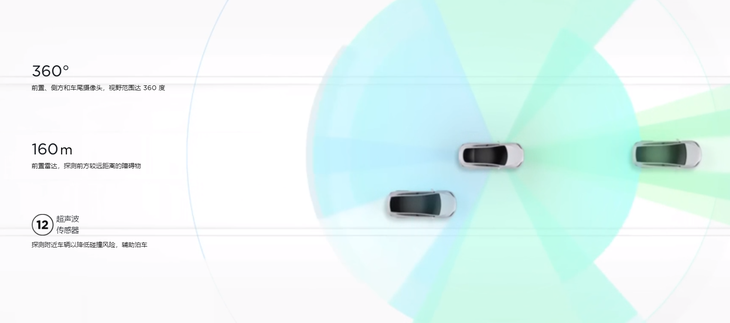
據了解,特斯拉採用8個攝像頭+1顆160米測距毫米波雷達+12顆超聲波雷達組合,特斯拉使用的感知方案可以看做是比較典型的視覺派自動駕駛。
視覺派的工作原理其實很容易理解,就是跟人眼感知環境類似。通過車載攝像頭捕捉到現實環境的2D畫面,然後利用算法構建出3D環境地圖,車輛能夠實時感知周圍環境情況。
視覺派的實現方式雖然相對簡單直接,但對算法要求非常高,算法需要對獲取到的2D圖像中的每一件物體進行準確的識別才能構建出可靠的3D地圖,地圖的可靠性直接關係到自動駕駛的最終效果。
視覺派自動駕駛的優點是整套硬體配置組合簡單,成本相對更低。神經網絡圖像識別算法在視覺派自動駕駛中起到至關重要的作用,海量的路測數據可用於神經網絡訓練,可以改善環境感知數據精度不足等問題,提供更準確的場景識別能力。
另外一種雷射雷達派自動駕駛就能有效提升場景識別的準確度。雷射雷達派一般會採用雷射雷達+毫米波雷達+攝像頭的混合感知方案,與視覺派主要區別在於增加了雷射雷達。

雷射雷達其實大家應該不會陌生,去年推出的iPhone 12 Pro、以及iPad Pro 2021上面都配備了雷射雷達,通過這顆雷達可獲取到更加精準3D深度信息,可用於3D建模等場景,電動車所搭載的的雷射雷達也是利用了類似的特性。

雷射雷達可以主動發射出大量不可見的雷射束,遇到物體時反射回來,結合光速和返回時間,就能實時計算出車輛與物體的距離、速度等,構建出一幅十分精確的3D空間地圖,精確度遠高於攝像頭所獲取到的2D圖像信息,更加可靠。

上面提到的毫米波雷達工作原理和雷射雷達類似,不過各自都有擅長的方面。毫米波雷達可以獲取到較為準確的相對速度、距離等信息,但無法實現精確的3D建模。毫米波雷達在汽車上使用的時候,通常還會過濾掉靜止的物體,無法實現全面的探測。不過在雨天、霧霾等惡劣天氣下,毫米波雷達仍舊能保證比較好的探測效果,可以作為雷射雷達的互補。
通過雷射雷達+毫米波雷達+攝像頭的組合,能夠讓電動車擁有更加精準的空間感知能力,並且在不同天氣下也能保證可靠性。上面提到的這些都是自動駕駛汽車的空間感知能力,硬體部分主要通過雷達+攝像頭的組合,獲取到環境空間的數據,讓汽車能夠實時理解所處的環境動態。
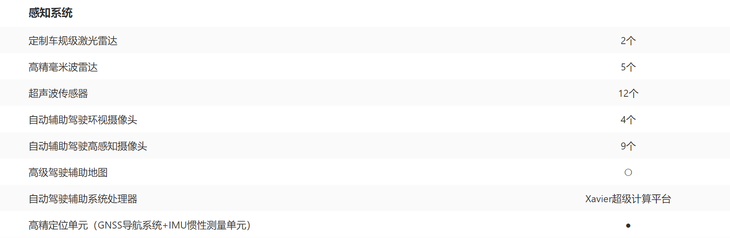
極狐阿爾法 S HI 版搭載了3顆雷射雷達、6顆毫米波雷達、12顆超聲波雷達、13個攝像頭。小鵬 P5最高搭載2個雷射雷達(最遠探測距離150m)、5個毫米波雷達、12個超聲波傳感器、13個攝像頭。這些都屬於雷射雷達派的自動駕駛,採用多傳感器混合感知方案。
多傳感器融合採集到的數據雖然更多更可靠,但怎麼整合利用好各種傳感器的數據又是另外一個問題。汽車具有了空間感知能力後,要想實現自動駕駛,還需要決策層決定汽車的下一步操作,並且傳遞給執行層。決策層需要根據獲取到的外部環境信息,來決定汽車的下一步操作。

決策層相當於汽車的大腦,代替了原本駕駛員需要決定的車輛操作,會根據目前掌握到的信息決定汽車下一步動作。比如決策層需要根據當前車輛附近的行人、障礙物等實時路況,決定車輛是否需要減速避讓、變換車道或者保持車距等。決策層
但因為道路上有各種不確定因素,特別是一些複雜的路面,需要決策層根據實時場景快速做出反應,算法的可靠性就十分重要。決策層需要通過深度學習神經網絡、以及大量路況數據的智能訓練,才能儘可能根據不同場景做出最佳的駕駛決策。
要想自動駕駛功能完全脫離人工幹預,算法層面是最終影響到自動駕駛效果的核心。就像手機拍照一樣,即使不同廠商使用同一款傳感器,因為調教算法和風格不一樣,最終你用不同手機拍攝出來的照片可能同樣會有較大的差別。

此外,自動駕駛還需要搭配高精度地圖、車聯網的支持,規劃出一條可行的路線,完成自動駕駛。因為自動駕駛全程都需要大量數據計算,算力也是自動駕駛方案中很重要的一部分配置,關係到自動駕駛面對不同場景實時決策、處理數據的速度。
從目前來看,在自動駕駛感知層面,雷射雷達等多傳感器融合是一個新的趨勢,可以提供更精準的感知信息,隨著雷射雷達成本下降,雷射雷達方案可能會變得更為常見。
自動駕駛是一項軟硬體高度融合的生態功能,未來自動駕駛核心差距應該還是會在自動駕駛的決策層,這部分與廠商的算法、數據積累等方面都有關係。不久的將來,可能更加完美的高階自動駕駛會變得更為尋常,讓我們拭目以待。









