還記得你的第一臺iPhone嗎?這才叫智能掃地機器人
2025-04-26 06:18:30 2
眼看著iPhone新品發布會就要來了,這一期泡泡網頭條問答除了關於iPhone情懷的宣洩,還有近期熱門遊戲《絕地求生·大逃殺》的入門性價比配置推薦,以及智能掃地機器人的相關知識科普。筆者現在是一門心思等著熬夜看蘋果發布會呢,大家要是覺得這文章能幫上忙就去今日頭條關注一波各位答主吧。

還記得你的第一臺iPhone嗎?——仿佛發現了新大陸
原問題:你第一次用上 iPhone 時是什麼感受?
iPhone一直以優秀的用戶體驗為賣點,想想當初上手iPhone時的感覺,就像初戀。泡泡網手機的第一臺iPhone,是5S。

我第一次用上iPhone的時候還是iPhone 5s剛剛發布,也正好趕上iOS 7的一次大的變革,所以直到現在我對於iOS 6的擬物化都沒有什麼特別深的感情,仍舊是覺得扁平的風格更討喜我。
在iPhone 5s之前用的是魅族MX手機,換到iPhone之後第一個感覺就是明顯精緻了許多,不論是從外觀工藝,還是系統UI上,都表現得和當時的國產手機有著非常大的差距。
也是從那之後,我正式跳進了iPhone的坑,到現在都沒有出來。
新iPhone能有多大變化?——沒有雙卡雙待
原問題:iPhone8會有什麼新的功能?
iPhone 8的新功能估計就是曝光出來的那些了,但是泡泡網手機認為,iPhone 8一定沒有雙卡雙待。

iPhone8這一次依舊是單卡的設計,並不會有雙卡雙待。但是信號圖標由原來的圓點形式改成了階梯形式則是因為iPhone 8頂部會有一個獨特的「劉海」,所以為了不浪費屏幕面積,一些固定的提示信息就要保留在頭簾的左右兩側,比如電池、WiFi圖標、信號以及鬧鐘或者藍牙等提示內容。
預算2500純打遊戲的配置有沒有?——奔騰、1050
原問題:大家可以推薦一臺預算2500,打遊戲的純主機嗎?
搞配置對於硬體學堂來說是最簡單的,2500元打遊戲的主機,核心硬體就是顯卡。

這套配置在目前來說,稱得上性價比的極限了,Intel的G4560是目前公認的入門神級處理器,可當I3來用,GTX1050配它也是再合適不過了。100系列主板刷一下BIOS其實也是可以用七代U的,而且價格更低。顯示器以及鍵鼠就只能你自配了,如果算上顯示器還想控制在2500元,那就基本沒法看了,所以目前低配的這樣就是非常實用的了。而且你提得要求是維修方便,還要求了性能,基本上這套配置是可以滿足你的需求的,用這套配置,玩LOL以及一些網遊是綽綽有餘了,如果想玩大型單機確實費勁,不過相信你想組裝的這臺電腦本身也不是為了玩大型單機。
流暢吃雞的最低配置咋鬧?——非常低畫質3500就夠了
原問題:能流暢玩《絕地求生》最低是什麼配置?大概多少錢?
不求特效,只求流暢。硬體學堂給你來一套3500元的性價比AMD配置。


AMD R3 1300X,16G內存,RX 560D顯卡,都很關鍵。
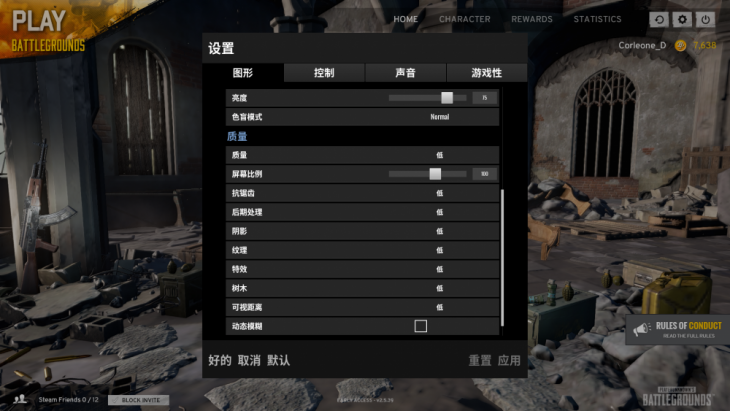
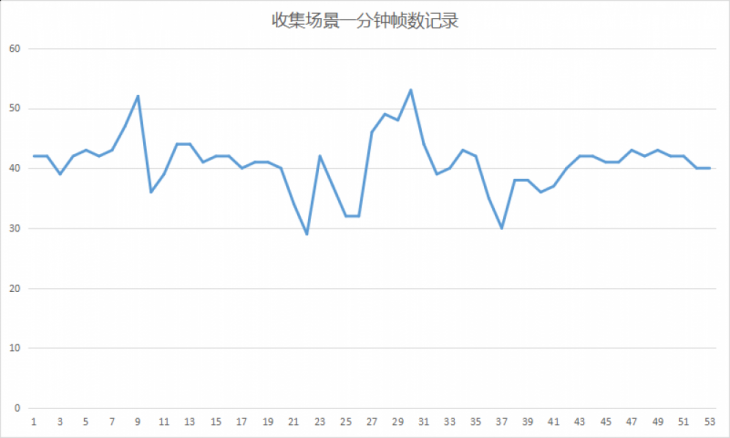
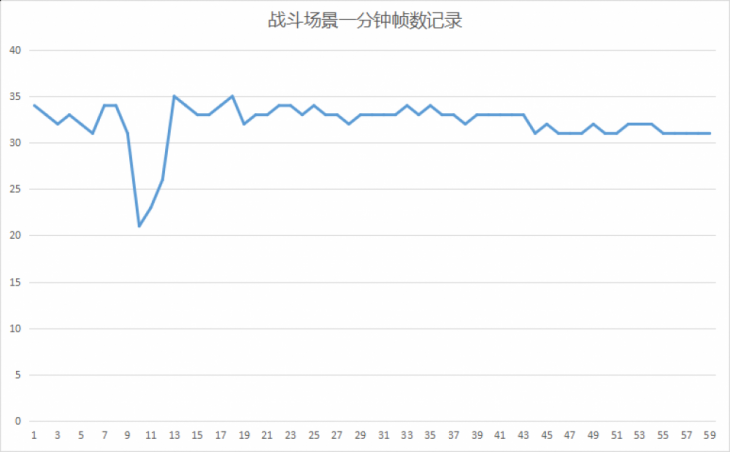
R3 1300X和RX 560D預設低質量畫面,在吃雞的收集階段,能夠做到最高50幀,最低30幀,平均40幀的性能輸出。在戰鬥的場景中,幀數則穩定在30-35幀之間。
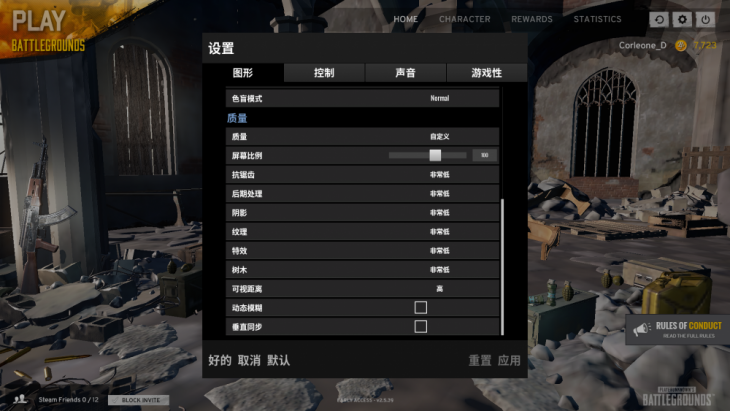
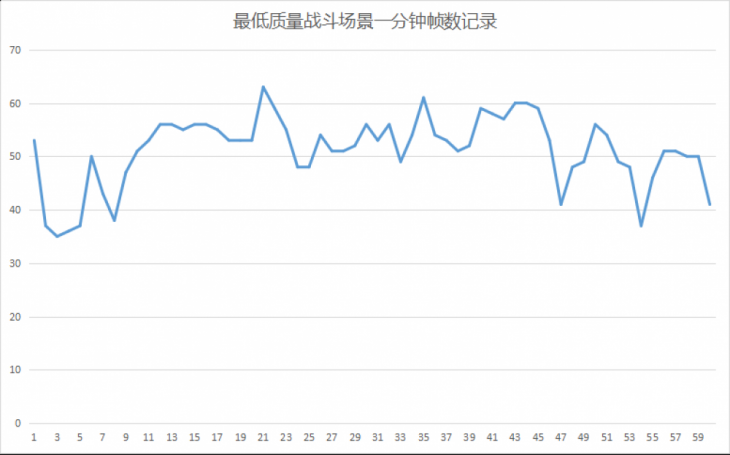
在非常低的畫質下,前後一分鐘的戰鬥加跑動場景,最低40幀,最高60幀,平均幀數為50幀。
掃地機器人應該怎麼選?——智能化是重要參數
原問題:掃地機器人高端貨和便宜貨的區別在哪?
泡泡網科技給你一句話,掃地機器人的智能化程度很重要。
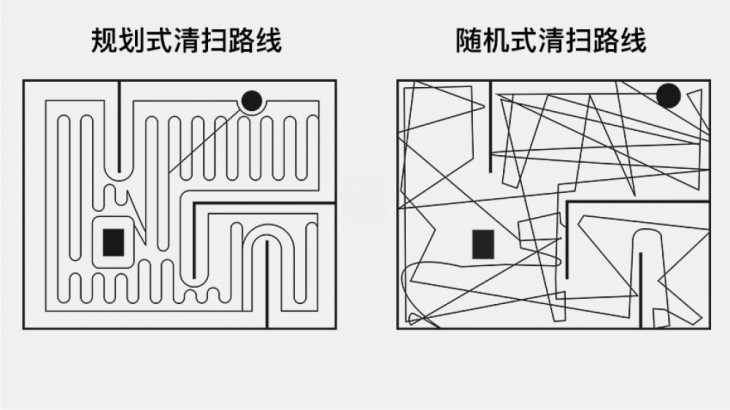
隨機式和規劃式清掃的不同
首先要知道掃地機器人大致可以分為隨機式和規劃式兩種,這主要是根據它們的清掃路線進行劃分的。
隨機式掃地機在工作過程中看不出任何規律,感覺就是在地上隨便亂掃,經常會出現反覆清掃或大面積漏掃的情況,但它也是有一定算法在裡面的,比如遇到障礙轉向多少度、卡主之後如何脫困等,算法的優劣直接決定了清掃的質量和效率的高低。雖說隨機式掃地機如果運行時間夠長,也能做到對地面的全覆蓋,但這是以犧牲大量時間為代價的。
規劃式掃地機相當於增加了導航,掃地的過程不再顯得那麼盲目,一切都有跡可循,清掃的覆蓋面有保證,效率比上面的隨機式高很多。規劃式掃地機必須要有定位的能力,也就是說要隨時知道自己在什麼地方,除此之外還要知道哪裡已經清掃、哪裡還沒有清掃,在此基礎上才能進行地圖構建和規劃清掃。
規劃式掃地機常見的定位方法
1、慣性導航定位
慣性導航掃地機器人依靠的是陀螺儀、加速度計等慣性傳感器,通過它們來獲取機器人的運動動態信息,是目前使用最廣泛的一種定位方法,缺點是精度受外界影響比較大,運行時間越長還會有偏航的現象。
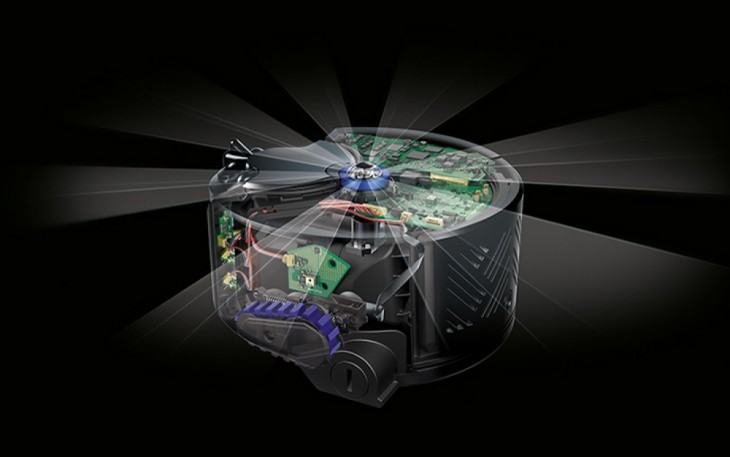
2、雷射測距導航定位
代表機型:Neato、小米

Neato掃地機頂部配備雷射測距傳感器,它可以根據雷射從發出到接收的時間來計算與前方障礙物的距離,在掃地過程中不停旋轉,通過測量周圍環境距離的變化來定位坐標,同時利用雷射雷達採集的數據繪製房間地圖,根據它規劃出非常好的路徑,實現規劃清掃。
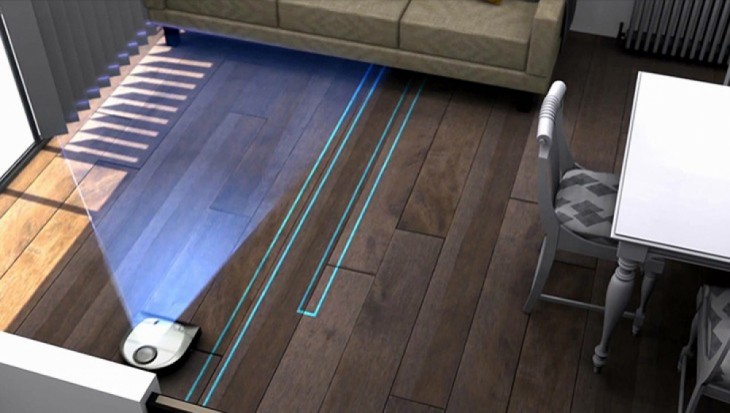
3、視覺定位系統
代表機型:戴森360 Eye、iRobot 980


以戴森360 Eye來說明視覺定位的基本原理,掃地機的頂部有一個360度全景攝像頭,相當於掃地機有了「眼睛」,它能夠以30幀/秒拍攝出周圍環境的照片,從而幫助掃地機認清周圍環境的一些關鍵特徵,根據這些關鍵特徵對機器人的方位進行持續的三角定位,配合同步定位與地圖創建軟體(SLAM)技術,它可以隨時知道哪裡已經清掃,哪裡還沒有清掃。
能否掃得乾淨看這些
1、吸力大小
通常來說,吸力越大掃得越乾淨,但只有大吸力還不夠,還與掃地機的清掃結構有關。
2、滾刷設計
有的掃地機並沒有配置滾刷,邊刷直接將灰塵送入吸塵口,而滾刷的作用在於可與清理附著在地面的一些頑固汙漬,減少漏掃情況的發生。不過同樣是滾刷,最終的清潔效果也會有不小的差異。
滾刷主要分為一字型和V型兩種,V型滾刷聚攏效果更好,灰塵不容易分散,效率更高。
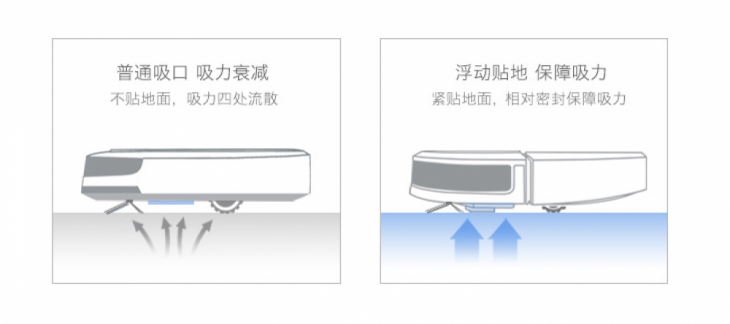
另外有的滾刷還採用浮動結構,即使地面不平,它會通過上下浮動來貼合地面,保證清潔效果。
其它一些購買建議
1、優先選擇規劃式,隨機式最好選iRobot這樣的大品牌,算法技術更有優勢;
2、規劃式掃地機越來越普遍,很多千元級掃地機也都說自己有路徑規劃,其中不乏有些是濫竽充數,連陀螺儀都沒有,拿什麼去定位,明顯是在偷換概念;
3、拖地功能並非必須。很多掃地機還配備了獨立的拖地組件,掃拖一體看上去很美好,但用掃地機拖地其實是件挺麻煩的事兒,需要水箱注水,等待一段時間才會向擦布滲水,耗費時間,而且如果地面髒汙程度比較嚴重,中途需要多次清洗抹布;
4、APP操控最好有。掃地機的所有操控都可以在手機上進行,這個功能在千元級掃地機上已經普及開來了;
5、電池容量越大越好。由於掃地機一般都支持自動回充,對電池容量不需要太過敏感,但如果單次清掃的面積比較大,最好選擇大容量的。
掃地機器人不只是個機器,更重要的是「機器人」,買掃地機器人的時候首先要看它智能水平,主要是路徑規劃能力的高低,其次再看清掃能力能否達到要求,這樣更容易買到靠譜的掃地機。
本文編輯:孫端
關注泡泡網,暢享科技生活。







