一種仿生人工肌肉及仿生機器人的製作方法
2024-04-14 07:38:05 1
1.本發明涉及人工肌肉技術領域,具體涉及一種仿生人工肌肉及仿生機器人。
背景技術:
2.仿生人工肌肉是一種新型智能柔性材料,可在外界刺激條件下(如電、磁、溫度、光、力、溼度等)產生伸縮、膨脹、彎曲、扭轉等運動並對外做功,在類人機器人、生物醫療、航空航天等領域具有重要的應用價值。生物肌肉的致動來源於肌原纖維的收縮,由蛋白質分子馬達提供的分布式動力實現肌絲間整體相對滑移運動,是一個多時空尺度的動力學過程,其中存在著隨機性、非線性等複雜特徵,要全面地理解其跨尺度結構與功能的關聯,尤其是建立生物肌肉中單根肌原纖維的致動機制和動力學特性的定量物理模型,還存在著巨大的挑戰。
3.公告號為cn104196816b的專利說明書中公開了一種以氣體作為工作介質的人工肌肉,一個具有缸筒活塞機構的阻尼收縮單元與一個彈性單元構成串聯裝置,阻尼收縮單元和彈性單元的總長度受拉力和工作氣壓的控制,不受其它約束;所述阻尼收縮單元設置為:後端蓋和中端蓋與缸筒通過螺紋密封連接,與活塞通過螺紋連接的活塞杆貫穿中端蓋,在中端蓋上設置進氣接頭安裝孔;在後端蓋上設置排氣口;所述彈性單元的結構設置為:在所述活塞杆的內部有空腔,其另一端與前端蓋螺紋連接並穿過中端蓋;在所述活塞杆中設置彈簧,彈簧的一端與活塞杆內的圓螺母固定連接,另一端連接導杆;所述導杆穿過前端蓋並在位於活塞杆外部杆端連接第一拉環,在後端蓋上通過固定支架設置第二拉環。
4.公開號為cn111360803a的專利說明書中公開了一種電磁人工肌肉,以單束肌纖維為構成單元,單束肌纖維包括若干電磁鐵、導磁橡膠和磁性液體,所述的導磁橡膠為空心圓柱狀結構,若干電磁鐵均等間距設置在導磁橡膠內,若干電磁鐵與導磁橡膠同軸布置,若干電磁鐵和導磁橡膠的內壁固定連接,每相鄰兩個電磁鐵及相鄰兩個電磁鐵之間的導磁橡膠均圍成一腔室,在所有的腔室內均注入磁性液體,所述的電磁鐵包括線圈和磁芯,所述線圈纏繞在磁芯上,所述的磁性液體為由磁性固體顆粒、基載液和界面活性劑混合而成的膠狀液體,相鄰的兩個電磁鐵、兩個電磁鐵之間的導磁橡膠及兩個電磁鐵之間的磁性液體構成肌節單元;向磁芯上的線圈通電,電磁鐵極化,磁性液體和導磁橡膠極化,相鄰的電磁鐵端部磁極相同或相反,每一肌節單元伸長或收縮,從而使單束肌纖維伸長或收縮。
5.上述仿生人工肌肉的設計只能模仿人體肌肉的一個或數個特徵,並在應力-應變、響應速度、功率密度、能量效率、直驅能力、生命周期等性能指標上達到一定要求。目前能夠同時實現類似生物肌肉在力密度、功率密度、峰值應變、帶寬、低成本、循環壽命和效率等方面綜合性能的仿生人工肌肉尚未實現,基於生物肌肉的分布式動力、多時空尺度的仿生肌肉結構也沒有成熟的報導。
技術實現要素:
6.本發明的一個目的在於提供一種仿生人工肌肉,能高度還原生物肌肉的結構特
徵,有效再現生物肌肉的優異綜合性能。
7.一種仿生人工肌肉,包括中心軸以及圍繞所述中心軸設置的運動副,所述運動副朝向所述中心軸的一側上設置有均勻分布的球窩觸點,所述中心軸朝向所述運動副的一側上設置有至少一組交替動作且能沿所述中心軸長度方向以及垂直所述中心軸方向移動的連杆,所述連杆沿垂直所述中心軸方向移動時,所述連杆靠近所述運動副的端部能伸入所述球窩觸點內。
8.本方案通過交替動作的連杆來驅動運動副動作,連杆可以沿垂直所述中心軸方向移動,移動範圍與球窩觸點的深度相匹配,可以沿所述中心軸長度方向做往復運動,運動範圍與球窩觸點的距離相匹配。
9.連杆依次與對應的球窩觸點接觸與離開,接觸的連杆帶動運動副運動,離開的連杆移動至下一個球窩觸點後接觸,從而實現運動副的步進功能。
10.作為優選,所述中心軸上對應每個所述連杆位置設置有用於驅動所述連杆沿所述中心軸長度方向移動的驅動器;
11.所述連杆為伸縮杆結構,所述連杆靠近所述運動副的端部上設置有線圈,所述中心軸內設置有為所述線圈通電的電路,所述球窩觸點內帶有磁性。
12.本方案中,驅動器可採用直線驅動機構,連接的一端固定在直線驅動機構的活動端上;線圈尺寸與球窩觸點匹配,可以通過電流方向控制磁場方向,從而與球窩觸點相吸配合或相斥分離。
13.作為優選,沿所述中心軸長度方向設置有多組所述運動副,相鄰組位於一條直線上的所述運動副首尾相連。
14.作為優選,所述中心軸設置有多個且相互平行。
15.上述方案通過串聯獲得長距離行程,通過並聯獲得高功率輸出,通過串聯並聯獲得長距離高功率輸出。
16.作為優選,所述球窩觸點內布置有鐵磁性金屬材料。
17.作為優選,所述中心軸和運動副的材質為聚乙烯纖維,所述連杆的材質為樹脂。
18.作為優選,所述中心軸、運動副與連杆通過3d列印技術製作。
19.本發明的另一目的在於提供一種仿生機器人,包含上述仿生人工肌肉。
20.本發明的有益效果:
21.(1)分布式動力,結構緊湊,質量輕,適合微型化應用場景。
22.(2)可三維疊加,將分布式動力的微小位移和力累加,實現加和效果,方便獲得高頻大位移運動特性。
23.(3)結構連接有一定的彈性餘量,容錯率高;高度還原生物肌肉的結構特徵,有效再現生物肌肉的優異性能。
附圖說明
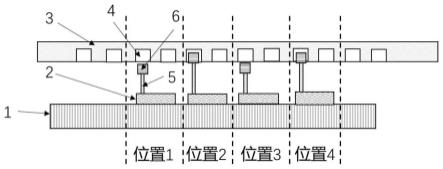
24.圖1為本發明仿生人工肌肉實施例1的一種動作狀態示意圖;
25.圖2為本發明仿生人工肌肉實施例1的另一種動作狀態示意圖;
26.圖3為本發明仿生人工肌肉實施例1的再一種動作狀態示意圖;
27.圖4為本發明仿生人工肌肉實施例2的結構示意圖;
28.圖5為本發明仿生人工肌肉實施例3的結構示意圖;
29.圖中:1、中心軸,2、驅動器,3、運動副,4、球窩觸點,5、連杆,6、線圈。
具體實施方式
30.下面將結合本發明實施例中的附圖,對本發明實施例中的技術方案進行清楚、完整地描述,顯然,所描述的實施例僅僅是本發明一部分實施例,而不是全部的實施例。基於本發明中的實施例,本領域普通技術人員在沒有做出創造性勞動前提下所獲得的所有其他實施例,都屬於本發明保護的範圍。
31.實施例1
32.如圖1-3所示,一種仿生人工肌肉,包括固定的中心軸1以及圍繞中心軸1設置的運動副3;中心軸1作為固定組件保證仿生結構整體的穩定,並為其他組件提供固定點位,其內部設有電路;運動副3朝向中心軸1的一側上設置有均勻分布的球窩觸點4,球窩觸點4內布置有鐵磁性金屬材料使得球窩觸點4內帶有磁性。
33.運動副3上相鄰兩個球窩觸點4的間距為一個驅動行程,中心軸1朝向運動副3的一側上設置有兩組驅動器2,驅動器2具體可採用齒輪齒條直線驅動機構或滾珠絲槓直線驅動機構,驅動器2的活動端上設置有連杆5,連杆5具體垂直中心軸1設置,驅動器2可以驅動連杆5在一個驅動行程內沿中心軸1長度方向往復運動。
34.連杆5靠近運動副3的端部上設置有微型線圈6,磁力大小和極性方向由電流大小和方向控制。本實施例中,連杆5為伸縮杆結構,通過控制線圈6的極性從而與球窩觸點4相吸配合或相斥分離;相吸配合時驅動連杆5伸展,相斥分離時驅動連杆5收縮;連杆5沿垂直中心軸1方向移動的移動範圍與球窩觸點4的深度相匹配。
35.本實施例中,需保證相鄰連杆5上的線圈6極性相反,以實現連杆5的交替伸縮,保證始終有線圈6與球窩觸點4接觸,從而保持運動副3的位置。
36.本實施例中,中心軸1和運動副3的材質為聚乙烯纖維,連杆5的材質為樹脂。
37.本實施例中,中心軸1、運動副3與連杆5通過3d列印技術製作。
38.本實施例的運動過程及原理如下:
39.通過電流方向控制微型線圈6的磁性方向,使位置1和位置3的微型線圈6的極性與球窩觸點4的極性相同,相斥驅動對應的連杆5脫離球窩觸點4;使位置2和位置4的微型線圈6極性與球窩觸點4的極性相反,相吸驅動對應的連杆5與球窩觸點4結合,如圖1所示。
40.隨後,位置2和位置4的驅動器2帶動對應的連杆5右移,連杆5帶動運動副3右移,移動距離為相鄰球窩觸點4的間距,如圖2所示。
41.移動到位後,通過電流方向控制微型線圈6的磁性方向,使位置2和位置4的連杆5在磁性斥力的作用下離開對應的球窩觸點4,並在驅動器2的作用下左移至臨近球窩觸點4的下方;使位置1和位置3的微型線圈6在磁性吸力的作用下進入上方對應的球窩觸點4,如圖3所示;在驅動器2的作用下通過對應的連杆5帶動運動副3移動。
42.上述過程循序進行即可實現運動副的定向移動,上述步驟反向進行即可實現運動副的反向移動。
43.實施例2
44.如圖4所示,本實施例與實施例1相比區別在於:圍繞仿生人工肌肉的中心軸1設置
有兩組運動副3,兩組運動副3沿中心軸1長度方向設置,每組運動副3包含一對運動副3,運動副3上的球窩觸點4均朝向中心軸1,相鄰組位於一條直線上的運動副3首尾相連,實現結構的串聯,最終實現運動副運動距離的疊加。
45.本實施例的工作過程與實施例1相似,通過電流方向控制微型線圈6的磁性方向,使兩組運動副3的位置1和位置3的微型線圈6的極性與球窩觸點4的極性相同,相斥驅動對應的連杆5脫離球窩觸點4;使位置2和位置4的微型線圈6極性與球窩觸點4的極性相反,相吸驅動對應的連杆5與球窩觸點4結合。
46.隨後,位置2和位置4的驅動器2帶動對應的連杆5右移,連杆5帶動運動副3右移,移動距離為相鄰球窩觸點4的間距。
47.移動到位後,通過電流方向控制微型線圈6的磁性方向,使位置2和位置4的連杆5在磁性斥力的作用下離開對應的球窩觸點4,並在驅動器2的作用下左移至臨近球窩觸點4的下方;使位置1和位置3的微型線圈6在磁性吸力的作用下進入上方對應的球窩觸點4,如圖3所示;在驅動器2的作用下通過對應的連杆5帶動運動副3移動。
48.本實施例也可設置超過兩組運動副3,兩組運動副3可包含多對。
49.實施例3
50.如圖5所示,本實施例在實施例2的基礎上增加了一個中心軸1,兩中心軸1平行設置,實現結構的並聯,最終實現運動距離疊加的同時,實現動力的疊加。
51.本實施例的工作過程與實施例2相似,通過電流方向控制微型線圈6的磁性方向,使每組運動副3上位置1和位置3的微型線圈6的極性與球窩觸點4的極性相同,相斥驅動對應的連杆5脫離球窩觸點4;使位置2和位置4的微型線圈6極性與球窩觸點4的極性相反,相吸驅動對應的連杆5與球窩觸點4結合。
52.隨後,位置2和位置4的驅動器2帶動對應的連杆5右移,連杆5帶動運動副3右移,移動距離為相鄰球窩觸點4的間距。
53.移動到位後,通過電流方向控制微型線圈6的磁性方向,使位置2和位置4的連杆5在磁性斥力的作用下離開對應的球窩觸點4,並在驅動器2的作用下左移至臨近球窩觸點4的下方;使位置1和位置3的微型線圈6在磁性吸力的作用下進入上方對應的球窩觸點4,如圖3所示;在驅動器2的作用下通過對應的連杆5帶動運動副3移動。
54.本發明仿生人工肌肉可以通過累計步進效果來實現運動副的高頻移動,並可以通過串聯獲得長距離行程,通過並聯獲得高功率輸出,通過串聯並聯獲得長距離高功率輸出,高度還原生物肌肉的結構特徵,有效再現生物肌肉的優異性能。
55.一種仿生機器人,包含上述的仿生人工肌肉,其結構已詳細闡述,此處不在贅述
56.儘管參照前述實施例對本發明進行了詳細的說明,對於本領域的技術人員來說,其依然可以對前述各實施例所記載的技術方案進行修改,或者對其中部分技術特徵進行等同替換,凡在本發明的精神和原則之內,所作的任何修改、等同替換、改進等,均應包含在本發明的保護範圍之內。