一種無人機群傳感網絡中的終端定位方法
2024-04-15 15:43:05 3
1.本發明屬於無線定位技術領域,具體涉及一種無人機群傳感網絡中的終端用戶定位方法以及與其相關的定位流程和定位鏈路選擇算法。
背景技術:
2.隨著逐步進入第五代移動通信網絡(5g)時代,智慧交通、智慧城市等典型的基於位置服務(location based service)的場景開啟了繁榮發展,由此,無線終端定位技術在日常生活和工業生產活動中的地位與作用日益凸顯。當前5g處於商業加速推廣階段,並且已將定位作為其中一項重要服務去推進整體5g業務性能的提升。無線傳感網絡定位系統可以根據不同的參數測量定位技術滿足不同用戶的位置服務需求,例如,在高動態場景下,由於都卜勒頻偏的存在,tdoa聯合fdoa定位技術不僅可以為終端用戶定位,還可以提供速度估計服務,從而實現更高維度和更高精度的定位服務。
3.近年來,無人機集群定位技術受到業界越來越多的關注,同時被公認為是5g移動通信網絡的重要使能技術之一。在惡劣的環境下,例如偏遠山區,傳統的衛星定位服務可能會由於網絡邊緣化等問題導致終端用戶定位服務失敗。在這種情況下,無人機群憑藉其高機動性和部署靈活等優勢,通過結合相應定位技術來利用多無人機的測量信息,有望彌補這一不足。與此同時,無人機群傳感網絡具備多種實時功能,例如通信,定位,測速等,因此具有資源利用效率高,成本低等潛在優勢。然而,在高動態場景下,由於系統中都卜勒頻移的影響,不可避免的會對通信鏈路的信噪比條件產生嚴重的負面影響,從而影響無人機群傳感網絡的通信能力。
4.鑑於無人機集群在執行任務過程中,需根據實時地形、突發情況等快速做出機動響應,產生較大的瞬時都卜勒頻移以及幾何構型變化,進而影響地面用戶通信、定位和測速等性能的問題,新型的終端用戶定位方法應充分挖掘網絡鏈路中通信和定位雙功能的實時共享能力,使空基集群在高動態環境下的通信和定位能力始終實時維持在較高水平,從而有效提升終端用戶的通信和定位的實時服務性能。
技術實現要素:
5.本發明目的在於提供一種無人機群傳感網絡的終端定位方法,以解決現有定位技術在無人機群傳感網絡中精度較低的問題,同時保障終端用戶的通信和定位的實時服務性能,有效提高資源利用效率。
6.本發明所提供的一種無人機群傳感網絡中的終端定位方法,包括以下步驟:
7.第一步,集群中的所有無人機均在預先設定好的符合一定閾值範圍的飛行軌跡上飛行,同時為地面用戶提供定位服務,且各無人機均可被地面待定位用戶終端所識別。
8.本發明所述的無人機集群作為地面用戶的定位基站,集合表示為地面待定位終端集合為無人機基站的可用性通過安全距離閾值來進行判決。當無人機集
群網絡中的任意兩架無人機之間的歐式距離均大於安全閾值時,才判決該無人機群傳感網絡中的無人機均為可用的終端定位參考基站。
9.第二步,利用第一步中所提的動態場景下無人機群傳感網絡中的隨機時間切片所提供的各用戶終端和無人機的位置坐標,計算每一個地面用戶終端與各無人機基站間的相對高度角與方位角,並以二者作為指標對可用無人機基站進行初步篩選與分組,從而得到多個符合一定幾何構型的基站子集。
10.為了儘可能改善無人機定位基站相對於地面待定位用戶終端的幾何分布構型,提出了旋轉掃描式無人機基站初次篩選算法,具體如下。
11.(1)對於定位終端用戶ui,計算該時刻與基站集合中的無人機n之間的相對高度角α
ni
和方位角β
ni
;
12.(2)初次選擇與終端用戶ui的相對高度角最小的基站作為參考基站節點,即有
13.(3)設置m組方位角分組參考角度其中為(2)中所選基站的方位角。根據方位角以及分組參考角度之間的差值對無人機基站進行分組。當條件滿足時,將無人機ni分入子組,其中j∈{1,...,m}。若第組根據上述角度分配方式得到的符合條件的無人機數量為零,即無符合該角度條件下的無人機分配進組,則接下來通過增加數值的方式來繼續對符合條件的無人機進行搜索,直至每個方位子組中最終至少包含一個無人機基站。
14.(4)設置旋轉掃描步進角δβ,δβ<2π/m,將(2)中參考基站節點的方位角分組參考角度增加δβ,並重新進行步驟(3),以儘可能的遍歷得到該區域範圍內所有符合條件的無人機基站組合,遍歷結果最終第j組的基站個數為nj,且最終得到l=2π/(δβ*m)數量的不同參考基站節點的無人機基站分組。
15.(5)從子組中各隨機選擇一個無人機組成無人機定位基站子集sk。每旋轉掃描一次,得到的所有符合條件的基站子集組成的總的集合表示為s
ptotal
,sk∈s
ptotal
,其中p∈{1,...,l}。
16.第三步,計算第二步中得到的所有子集sk的位置(三維)精度因子並根據位置(三維)精度因子的值對每一個無人機定位基站子集進行二次優選。
17.為了進一步改善無人機定位基站與待定位終端的幾何構型對終端定位的影響,本發明提出二次無人機定位子集的優選方法,具體步驟如下。
18.(1)計算第二步中得到的無人機基站子集sk的位置(三維)精度因子值,可進一步表示為:
[0019][0020]
上式中,是無人機定位基站子集sk的定位觀測方程的雅可比矩陣,則可進一步
有:
[0021][0022]
上式中,i
t
=[x
t
,y
t
,z
t
]
t
,(t∈sk)表示無人機定位基站子集sk中的無人機的三維坐標,x=[x,y,z]
t
則為待定位用戶的三維坐標。
[0023]
(2)計算每一個總的集合s
ptotal
中所有的無人機基站子集sk對應的位置(三維)精度因子值,從小到大排列,選出其中最小的無人機基站子集並存入新的集合故集合中共有l個值最小的無人機定位基站子集。
[0024]
第四步,計算第三步得到的集合中所有基站子集對應的鏈路信噪比損失值,並根據每個子集的鏈路信噪比損失值對集合中所有基站子集進行最終優選,得到通信和感知性能最優的鏈路子集。
[0025]
為進一步提升終端用戶通信和定位雙功能的實時共享能力,使空基集群在高動態環境下的通信和定位能力始終實時維持在較高水平,本發明提出定位基站子集的最終優選策略,具體步驟如下。
[0026]
(1)計算中所有基站子集對應的鏈路信噪比損失值,其中可進一步表示為:
[0027][0028]
上式中,ts為系統採樣周期,δφ為相位偏差,為系統信噪比。由上式中可看出,信噪比損失和該無人機基站子集的無人機-地面用戶鏈路的都卜勒頻偏δfc的大小有關。更進一步的,都卜勒頻偏δfc可以由到達頻率差(fdoa)定位方法通過測量該時刻無人機群和待定位用戶之間的相對位置和相對速度來獲得,其中i
t
=[x
t
,y
t
,z
t
]
t
,(t∈sk)表示無人機定位基站子集sk中的無人機的三維坐標,表示子集sk中的無人機瞬時速度矢量。
[0029]
(2)計算每個子集的鏈路信噪比損失值,並將其從小到大排列,選擇值最小的無人機子集作為中最終優選得到的通感性能最優的鏈路子集即
[0030]
第五步,對用戶終端集合中的每一位用戶均利用上述方法進行最佳無人機定位基站的優選,並且根據第四步中選出的最優無人機基站子集為該終端提供定位服務。
[0031]
本發明一種無人機群傳感網絡中的終端定位方法,和現有定位方法相比,其優勢和有益效果在於:通過上述基於幾何構型和信噪比損失d
nf
的通感鏈路優選方法,為用戶終端選擇同一時刻下幾何構型分布較好且通信質量較高的鏈路,從而保障並提升終端用戶的實時通信和定位性能。
附圖說明
[0032]
為了對所提發明的技術原理和具體流程方案進行更為清晰的說明,下面將對實施例中所涉及到的相關附圖進行簡單說明與介紹。顯然,下文所描述的附圖1~3僅僅是用於實施例的描述與說明,對於本領域的普通相關技術研究人員而言,此類其他附圖還可以在不通過創造性勞動的前提下來獲得。
[0033]
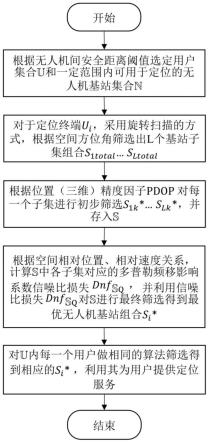
圖1為本發明所提出的終端定位方法的流程圖。
[0034]
圖2為本發明所提出的基於幾何構型和信噪比損失d
nf
的通感鏈路優選方法流程圖。
[0035]
圖3為本發明所針對的無人機群傳感網絡示意圖。
具體實施方式
[0036]
以下將結合附圖和實施例對本發明的特徵和原理作進一步描述,所列舉實施例的作用僅限於解釋本發明,並非用於限定本發明的應用範圍。
[0037]
參照圖1所示,本發明提出一種無人機群傳感網絡中的終端定位方法,下面將以無人機集群基站的可用性判決閾值(安全距離閾值)初始方位角分組組數m=5,方位角分組參考角度劃分閾值增加值無人機參考基站的旋轉掃描步進角為例對所提供的總體發明方法的具體實施方式進行進一步解釋和詳細介紹。
[0038]
本發明首先提供了通過一定範圍內無人機間的安全距離閾值來對無人機基站可用性進行判決的方法,如步驟1所示。
[0039]
步驟1:首先對無人機之間的歐氏距離進行距離閾值的設置,即,當任意兩架無人機之間的距離大於時,即可判定該範圍內的無人機均屬於用戶終端定位的可用性範圍,即該無人機群傳感網絡中的無人機均為可用的終端定位參考基站,集合為
[0040]
在確定終端定位可用基站的集合後,為了儘可能改善無人機定位基站相對於地面待定位用戶終端的幾何分布構型,本發明提出了旋轉掃描式無人機基站初次篩選算法,具體流程如步驟2.1~步驟2.5所示。
[0041]
步驟2.1:對於定位終端ui,計算該時刻其與基站集合中的無人機n之間的相對高度角α
ni
和方位角β
ni
;
[0042]
步驟2.2:初次選擇與終端用戶ui的相對高度角最小的基站作為參考基站節點,即有
[0043]
步驟2.3:設置初始5組方位角分組參考角度其中為步驟2.2中所選基站的方位角。即根據方位角將符合條件的基站分為5組,且每組的分組角
[0044]
度間隔為當條件滿足時,將基站ni分入子組,其中j∈{1,...,5}。若第組根據上述角度分配得到的基站數量為零,即無符合該角度條件下的無人機分配進組,則通過以數值增加量來增加的方式來繼續對其他未入選歸組的無人機基站進行搜索,直至每個方位子組中至少包含一個符合條件的無人機基站。
[0045]
步驟2.4:將(2)中參考基站節點的相對高度角增加步進角且有並重新進行步驟(3),目的以儘可能的遍歷得到所有該區域範圍內符合條件的無人機基站組合,最終第j組的基站個數為nj,且最終得到數量的不同參考基站節點的無人機基站分組。
[0046]
步驟2.5:從5組方位角分組子組中各隨機選擇一個的無人機組成無人機定位基站子集sk,即每個子集中包含的無人機基站數目為5。每旋轉掃描一次,得到的所有符合條件的基站子集組成的總的集合表示為s
ptotal
,sk∈s
ptotal
,其中p∈{1,...,12}。
[0047]
至此,根據基本的角度劃分分組的方式得到了無人機基站分布較為均勻的子集集合,接下來,需對所得到的集合進行進一步篩選,且篩選指標為無人機基站子集和待定位終端組成的幾何構型的評價標準位置(三維)精度因子該部分的具體流程為步驟3.1~步驟3.2所示。
[0048]
步驟3.1:根據公式計算第二步中得到的無人機基站子集sk的位置(三維)精度因子值,sk∈s
ptotal
,其中p∈{1,...,12}。
[0049]
步驟3.2:將上述計算得到的數值按照從小到大排列,選出其中最小值對應的無人機基站子集並存入新的子集故子集中最終得到l=12個值最小的無人機定位基站子集。
[0050]
至此,良好的pdop保障了無人機基站的幾何構型以及為終端用戶提供定位服務的能力,為進一步提升終端用戶通信和定位雙功能的實時共享能力,使空基集群在高動態環境下的通信和定位能力始終實時維持在較高水平,本發明提出定位基站子集的最終優選策略,計算第三步得到的集合中所有基站子集對應的鏈路信噪比損失值,其中並根據每個子集的鏈路信噪比損失值對集合中所有基站子集進行最終優選,得到通信和感知性能最優的鏈路子集,具體如步驟4.1~步驟4.2所示。
[0051]
步驟4.1:計算中所有基站子集對應的鏈路信噪比損失值,其中
[0052]
步驟4.2:將步驟4.1中計算得到的信噪比損失按照從小到大
排列,選擇值最小值對應的子集作為中最終優選得到的通感性能最優的鏈路子集即
[0053]
最後,對用戶終端集合中的每一位用戶均利用上述方法進行最佳無人機定位基站的優選,並且根據第四步中選出的最優無人機基站子集為該終端提供定位服務,具體如步驟5所示。
[0054]
步驟5:根據上述方法,使用以及相應距離和速度測量值為終端用戶ui提供定位服務。
[0055]
通過上述無人機鏈路優選策略,最終為終端用戶ui優選出的無人機基站鏈路子集具有幾何構型質量好且信噪比損失較小的優勢,該方法在提升終端用戶定位性能的同時,保障了基站和終端用戶之間的高通信質量。
[0056]
上述所列舉實施例涉及到的本發明的特徵和原理的整體詳細流程圖如圖2所示,本發明所針對的相關場景圖如圖3所示。
[0057]
綜上所述,本發明提出的一種無人機群傳感網絡中的終端定位方法可以通過無人機基站-待定位終端鏈路優選的方式,為終端用戶篩選出幾何構型良好的以及與此同時信噪比損失較小的無人機定位基站集合,在保障終端用戶定位精度的同時達到通信質量較高的目的,最終使空基集群在高動態環境下的通信和定位能力始終實時維持在較高水平,從而有效提升終端用戶的通信和定位的實時服務性能。