神舟十四航天員再次出艙前,還有另一項測試(雙臂對接)
2024-02-09 21:10:17 2
9月17日下午,中國太空人陳冬和蔡旭哲成功地進行了4小時12分鐘的艙外行走,這是神舟14人在9月1日之後的第二次艙外活動。這也是迄今為止中國最短的太空行走,也是「天宮」空間站最短的出艙時間。它已經為即將到來的「問天堂」旋轉和「夢天堂」實驗模塊做好了準備。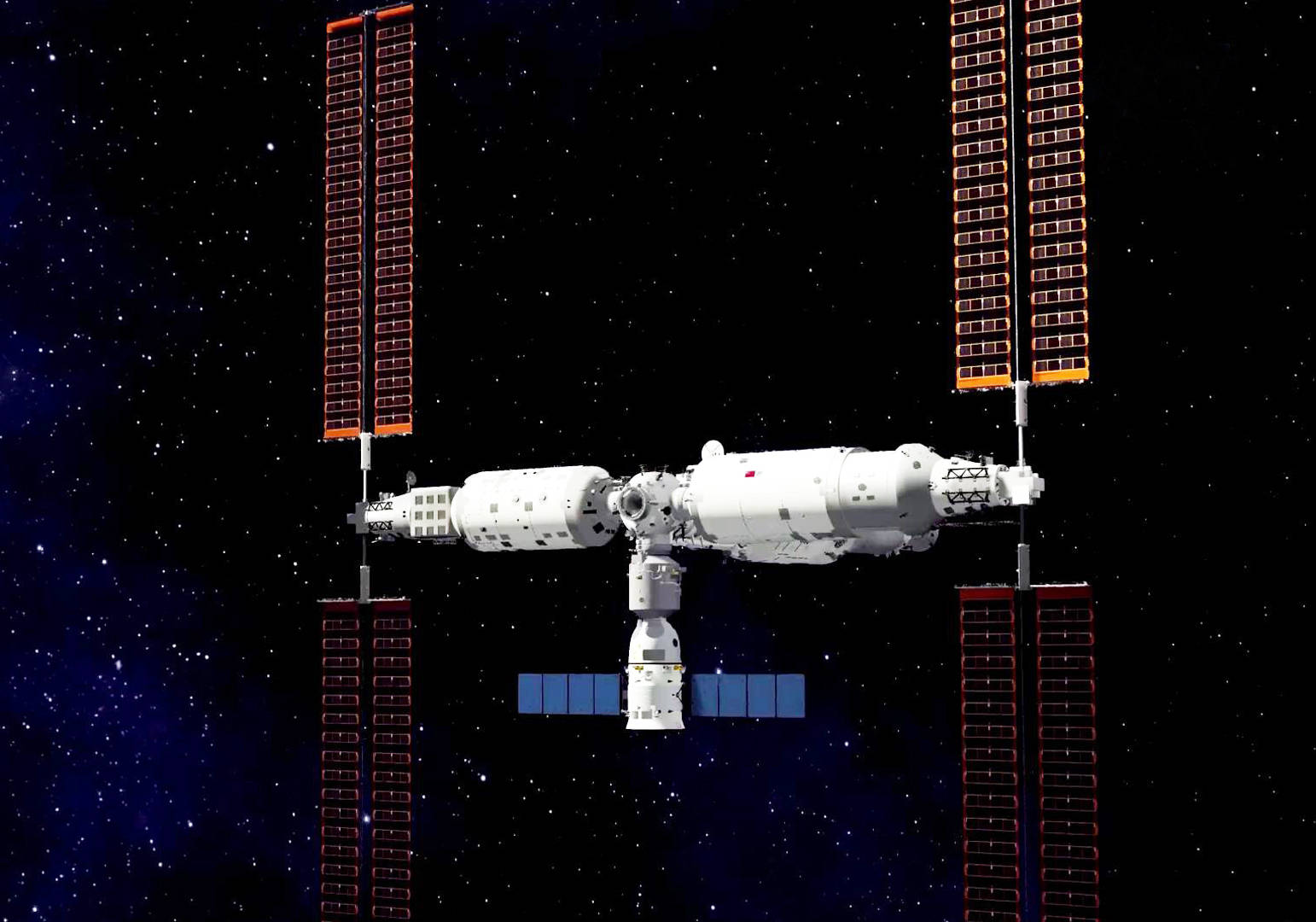
之前這是我們真正的原創技術,很多媒體都說我國空間站的機械臂可以爬七自由度,其實加拿大的2個機械臂,國際空間站,以及俄羅斯科學實驗室外的歐洲機械臂,也都可以做七自由度,但它們不能對接,我們對於太空機械手實現了新的突破。
事實上,未來的機械臂將不得不執行更精細的操作,以使空間站無人駕駛。國際空間站在這方面仍然領先於我們,因為除了加拿大-2臂外,它還有一個「加拿大手」,即Dextre,可以執行毫米級的精密操作,如螺釘旋轉、在軌推進劑加油和在軌衛星服務。









