一種用於加強車載CT機穩固的機架傾角自動補償系統的製作方法
2024-04-14 20:17:05 3
一種用於加強車載ct機穩固的機架傾角自動補償系統
技術領域
1.本發明屬於車載ct機技術領域,特別是涉及一種用於加強車載ct機穩固的機架傾角自動補償系統。
背景技術:
2.通常情況下,包括ct機和診斷床在內的ct系統是安裝在醫院等固定場所來使用的。其中,ct機在進行現場安裝時,由於安裝地面不平,ct機的機架機械誤差等因素,需要在安裝完機架後,現場工程師再對ct機進行一次性水平校準,通過水平儀測試機架的水平角度,並將當前的水平角度寫進系統預先設置的表格中,以此來補償機架安裝帶來的水平偏差。
3.但在某些特殊情況下,例如突發公共衛生事件等,為了能在臨時區域或第一時間為患者進行檢查,車載ct成為一種需求。但是當把帶機架傾斜功能的ct機應用於車載ct時,會由於車載ct移動的特點,車載ct每次停放的位置無法做到一致且保持水平,因此一次性水平校準的值無法適用,因此需要在車載ct機每次使用前,手動進行調節,操作費時費力,且機械調整水平裝置設計複雜而且價格昂貴。
技術實現要素:
4.針對現有技術存在的不足,本發明的目的在於提供一種能夠檢測出車載ct機傾斜角度、並根據檢測數據自行調平的用於加強車載ct機穩固的機架傾角自動補償系統。
5.為解決上述技術問題,本發明是通過以下技術方案實現的:
6.本發明為一種用於加強車載ct機穩固的機架傾角自動補償系統,包括ct機機架和安裝在ct機機架上可傾斜部分的第一傾角傳感器,所述第一傾角傳感器用於測量所述可傾斜部分的當前傾斜角度,並輸出第一角度值;安裝在ct機機架上靜止部分的第二傾角傳感器,所述第二傾角傳感器用於測量所述靜止部分所表徵的ct機機架安裝平面的當前傾斜角度,並輸出第二角度值。
7.安裝在ct機機架上可傾斜部分中間位置的第一水平儀,所述用於測量所述第一水平儀可傾斜部分的當前水平狀態,並輸出第一水平值;安裝在ct機機架上靜止部分的第二水平儀,所述第二水平儀用於測量所述靜止部分所表徵的ct機機架安裝平面的當前水平狀態,並輸出第一水平值。
8.中央處理器,用於接收所述第一角度值和所述第二角度值;利用所述第一角度值減去所述第二角度值以及所述第一傾角傳感器和所述第二傾角傳感器的固定偏差,得到所述機架的可傾斜部分相對於所述機架安裝平面的傾角。
9.安裝ct機機架中靜止部分頂部用於支撐可傾斜部分的球形支撐座,安裝在ct機機架中靜止部分頂部且圍繞球形支撐呈環形等距設置的若干電動伸縮杆,所述電動伸縮杆遠離ct機機架中靜止部分的一端與安裝ct機機架中可傾斜部分固定連接。
10.作為本發明的一種優選技術方案,所述第二傾角傳感器進一步通過一內置陀螺儀
檢測承載所述ct機的車體的運動狀態,並輸出所述運動狀態;所述運動狀態為移動狀態或靜止狀態。
11.作為本發明的一種優選技術方案,所述中央處理器進一步用於接收所述運動狀態,並在所述運動狀態為靜止狀態時,執行所述利用所述第一角度值減去所述第二角度值以及所述第一傾角傳感器和所述第二傾角傳感器的固定偏差,得到所述機架的可傾斜部分相對於所述機架安裝平面的傾角的操作。
12.作為本發明的一種優選技術方案,所述第一傾角傳感器和所述第二傾角傳感器的固定偏差包括:所述第一傾角傳感器和所述第二傾角傳感器在0度時的讀數偏差,以及所述第一傾角傳感器和所述第二傾角傳感器的安裝面的安裝偏差。
13.本發明的優點是:
14.1、本發明通過在車載ct機的機架上可傾斜部分安裝第一傾角傳感器、第一水平儀,在靜止部分安裝第二傾角傳感器、第二水平儀在使用時能夠時刻監控車輛和安裝在車內ct機架上的ct機的傾斜狀態,並將檢測到的數值傳輸至中央處理器,經過處理後計算出機架可傾斜部分的實際傾角,即機架可傾斜部分相對於安裝平面的傾角,從而得到了車載ct機真實的機架傾角。
15.2、本發明通過安裝在可傾斜部分和靜止部分之間的電動伸縮杆、球形支撐座,在中央處理器計算出機架的實際傾斜角度後,能夠控制若干電動伸縮杆工作,從而對可傾斜部分進行調整,使得安裝在可傾斜部分的ct機保持水平,進而保證了車載ct的成像質量。
附圖說明
16.為了更清楚地說明本發明實施例的技術方案,下面將對實施例描述所需要使用的附圖作簡單地介紹,顯而易見地,下面描述中的附圖僅僅是本發明的一些實施例,對於本領域普通技術人員來講,在不付出創造性勞動的前提下,還可以根據這些附圖獲得其他的附圖。
17.圖1為本發明一種用於加強車載ct機穩固的機架傾角自動補償系統的結構示意圖。
18.圖2為本發明另一視角的結構示意圖。
19.圖3為本發明的主視圖。
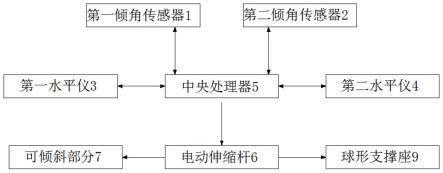
20.圖4為本發明的系統框圖。
21.附圖中:1、第一傾角傳感器;2、第二傾角傳感器;3、第一水平儀;4、第二水平儀;5、中央處理器;6、電動伸縮杆;7、可傾斜部分;8、靜止部分;9、球形支撐座。
具體實施方式
22.需要說明的是,在不衝突的情況下,本技術中的實施例及實施例中的特徵可以相互結合。下面將參考附圖並結合實施例來詳細說明本發明。
23.需要指出的是,除非另有指明,本技術使用的所有技術和科學術語具有與本技術所屬技術領域的普通技術人員通常理解的相同含義。
24.本發明中,在未作相反說明的情況下,使用的方位如「上、下」通常是針對附圖所示的方向而言,或者是針對豎直、垂直或重力方向上而言的;同樣地,為便於理解和描述,「左、
右」通常是針對附圖所示的左、右;「內、外」是指相對於各部件本身的輪廓的內、外,但上述方位詞並不用於限制本發明。
25.具體實施例一:
26.請參閱圖1-4所示,本發明為一種用於加強車載ct機穩固的機架傾角自動補償系統,包括ct機機架和安裝在ct機機架上可傾斜部分7的第一傾角傳感器1,第一傾角傳感器1用於測量可傾斜部分7的當前傾斜角度,並輸出第一角度值;安裝在ct機機架上靜止部分8的第二傾角傳感器2,第二傾角傳感器2用於測量靜止部分8所表徵的ct機機架安裝平面的當前傾斜角度,並輸出第二角度值。
27.安裝在ct機機架上可傾斜部分7中間位置的第一水平儀3,用於測量第一水平儀3可傾斜部分7的當前水平狀態,並輸出第一水平值;安裝在ct機機架上靜止部分8的第二水平儀4,第二水平儀4用於測量靜止部分8所表徵的ct機機架安裝平面的當前水平狀態,並輸出第一水平值。
28.中央處理器5,用於接收第一角度值和第二角度值;利用第一角度值減去第二角度值以及第一傾角傳感器1和第二傾角傳感器2的固定偏差,得到機架的可傾斜部分7相對於機架安裝平面的傾角。
29.安裝ct機機架中靜止部分8頂部用於支撐可傾斜部分7的球形支撐座9,安裝在ct機機架中靜止部分8頂部且圍繞球形支撐呈環形等距設置的若干電動伸縮杆6,電動伸縮杆6遠離ct機機架中靜止部分8的一端與安裝ct機機架中可傾斜部分7固定連接。
30.第二傾角傳感器2進一步通過一內置陀螺儀檢測承載ct機的車體的運動狀態,並輸出運動狀態;運動狀態為移動狀態或靜止狀態;中央處理器5進一步用於接收運動狀態,並在運動狀態為靜止狀態時,執行利用第一角度值減去第二角度值以及第一傾角傳感器1和第二傾角傳感器2的固定偏差,得到機架的可傾斜部分7相對於機架安裝平面的傾角的操作。
31.第一傾角傳感器1和第二傾角傳感器2的固定偏差包括:第一傾角傳感器1和第二傾角傳感器2在0度時的讀數偏差,以及第一傾角傳感器1和第二傾角傳感器2的安裝面的安裝偏差。
32.中央處理器5與第一傾角傳感器1、第二傾角傳感器2、第一水平儀3、第二水平儀4和電動伸縮杆6電連接,中央處理器5用於接收第一傾角傳感器1、第二傾角傳感器2、第一水平儀3、第二水平儀4傳輸的數值,並控制若干電動伸縮杆6的伸縮。
33.在車載ct機的機架上可傾斜部分7安裝第一傾角傳感器1、第一水平儀3,在靜止部分8安裝第二傾角傳感器2、第二水平儀4在使用時能夠時刻監控車輛和安裝在車內ct機架上的ct機的傾斜狀態,並將檢測到的數值傳輸至中央處理器5,經過處理後計算出機架可傾斜部分7的實際傾角,即機架可傾斜部分相對於安裝平面的傾角,從而得到了車載ct機真實的機架傾角。
34.具體實施例二:
35.在具體實施例一的基礎上,本實施例的不同點在於:
36.如圖1、2所示,第二水平儀4通過ct機機架上靜止部分8與運載車輛連接,用於檢測在使用狀態車輛承載平臺所處的平面狀態,用於配合第二傾角傳感器2中的內置陀螺儀檢測,承載ct機的車體的運動狀態,並輸出所處狀態,車輛保持水平還是處於傾斜狀態。第一
水平儀3通過ct機機架上可傾斜部分7與安裝的ct機相連,用於檢測在使用狀態ct機是否處於水平狀態。
37.具體實施例三:
38.在具體實施例二的基礎上,本實施例的不同點在於:
39.如圖1、2所示,若干電動伸縮杆6與中央處理器5連接,電動伸縮杆6用於調整ct機機架上可傾斜部分7的傾斜角度和方向。在中央處理器5計算出機架的實際傾斜角度後,能夠控制若干電動伸縮杆6工作,從而對可傾斜部分7進行調整,使得安裝在可傾斜部分7的ct機保持水平,進而保證了車載ct的成像質量。
40.顯然,上述所描述的實施例僅僅是本發明一部分的實施例,而不是全部的實施例。基於本發明中的實施例,本領域普通技術人員在沒有做出創造性勞動前提下所獲得的所有其他實施例,都應當屬於本發明保護的範圍。
41.需要注意的是,這裡所使用的術語僅是為了描述具體實施方式,而非意圖限制根據本技術的示例性實施方式。如在這裡所使用的,除非上下文另外明確指出,否則單數形式也意圖包括複數形式,此外,還應當理解的是,當在本說明書中使用術語「包含」和/或「包括」時,其指明存在特徵、步驟、工作、器件、組件和/或它們的組合。
42.需要說明的是,本技術的說明書和權利要求書及上述附圖中的術語「第一」、「第二」等是用於區別類似的對象,而不必用於描述特定的順序或先後次序。應該理解這樣使用的數據在適當情況下可以互換,以便這裡描述的本技術的實施方式能夠以除了在這裡圖示或描述的那些以外的順序實施。
43.以上所述僅為本發明的優選實施例而已,並不用於限制本發明,對於本領域的技術人員來說,本發明可以有各種更改和變化。凡在本發明的精神和原則之內,所作的任何修改、等同替換、改進等,均應包含在本發明的保護範圍之內。
44.以上所述僅是本發明的優選實施方式,本發明的保護範圍並不僅局限於上述實施例,凡屬於本發明思路下的技術方案均屬於本發明的保護範圍。應當指出,對於本技術領域的普通技術人員來說,在不脫離本發明原理前提下的若干改進和潤飾,這些改進和潤飾也應視為本發明的保護範圍。