一種液體火箭發動機試驗零漂數據處理方法及系統
2024-04-16 03:28:05 5
1.本發明涉及液體火箭發動機試驗測量領域以及人工智慧技術領域,具體為一種液體火箭發動機試驗零漂數據處理方法及系統。
背景技術:
2.液體火箭發動機技術領域廣泛,工作環境惡劣,從開發到最終應用都需要進行大量的地面和高空模擬試驗。大量測試數據用於確定發動機性能指標和評估發動機可靠性。由於被測信號主要由傳感器和採集設備獲取,傳感器和儀器不可避免的故障可能導致測試參數數據不準確或不可用。
3.在火箭地面實驗中,通常使用壓電傳感器來採集振動信號,測試現場惡劣的環境條件會因串聯模式幹擾、共模幹擾、電氣噪聲、溫度、振動等對測量信號產生幹擾和噪聲,從而導致零點漂移。而針對加速度計測數據零點漂移大的問題,現有的方法多針對傳感器選擇進行優化實驗,適用性不強,可靠性不高,往往無法用於其他測試環境,並且缺少從數據補償處理方面的方法,因此,在不改變現有實驗條件的情況下,採用數據補償處理方法是非常必要的。
技術實現要素:
4.針對現有技術中存在的問題,本發明提供一種液體火箭發動機試驗零漂數據處理方法及系統,提高了實驗測量的加速度數據質量,保證後續數據分析。
5.本發明是通過以下技術方案來實現:
6.一種液體火箭發動機試驗零漂數據處理方法,包括以下步驟:
7.步驟1、獲取液體火箭發動機地面和高空試車試驗的振動加速度數據,並確定振動加速度數據的零漂數據;
8.步驟2、確定零漂數據的異常數據並對採用任一零漂數據對其替代,得到剔除異常數據的零漂數據;
9.步驟3、構建bp神經網絡,採用步驟2得到的零漂數據作為樣本數據,並以最小誤差為目標優化bp神經網絡;
10.步驟4、根據優化的bp神經網絡構建lmbp神經網絡並進行訓練,以步驟1中未發生零漂的振動加速度數據為標準輸入,訓練後的lmbp神經網絡輸出步驟2補償數據,採用補償數據更新對步驟2替代零漂數據。
11.優選的,步驟1所述零漂數據的確定方法如下:
12.對振動加速度數據進行時頻域轉換,以零線為基準線,將漂離基準線的數據作為零漂數據。
13.優選的,所述時頻域轉換的方法如下:
14.15.其中,f為採樣頻率,ω為角頻率。
16.優選的,步驟2中異常數據的剔除方法如下:
17.利用3σ理論,以標準誤差σ概率為區間,當各零漂數據的殘餘誤差的絕對值vi》3σ時,將該零漂數據作為異常數據。
18.優選的,步驟2中採用任一零漂數據所有正常值的均值對該異常數據進行替代。
19.優選的,所述標準誤差的表達式如下:
[0020][0021]
其中,δi為剩餘誤差,n為樣本個數。
[0022]
優選的,步驟3中採用levenberg-marquardt優化算法,利用剔除異常數據的零漂數據以mine(x
*
)為目標對權閾值組合解x
*(k)
進行修正,優化bp神經網絡,mine(x
*
)為實際輸出和期望輸出的最小差值。
[0023]
優選的,所述bp神經網絡的最小誤差對應的解的表達式如下:
[0024][0025]
其中,x
*
為所求結構為m-p-n神經網絡的權閾值的組合,n1為訓練樣本個數,yk為第k個樣本實際輸出,tk第k個樣本期望輸出。
[0026]
優選的,步驟4中所述lmbp神經網絡利用所有振動加速度數據以mine(x
*
)為目標對權閾值組合解進行修正,第k+1次迭代的新解的表達式如下:
[0027][0028]
lmbp神經網絡的權閾值變化量δx
*
的表達式如下:
[0029]
δx
*
=-(j
t
(x
*
)
·
j(x
*
)+μi)-1jt
(x
*
)
·
e(x
*
)
[0030]
式中,j(x
*
)為jacobian矩陣,e(x
*
)為第i次迭代網絡結點輸出誤差,i為單位矩陣,μ為比例係數。當μ
→
0時,μi
→
0,忽略不計,δx
*
=-(j
t
(x
*
)
·
j(x
*
))-1jt
(x
*
)
·
e(x
*
),當μ
→
∞時,j
t
(x
*
)
·
j(x
*
)《《μi,忽略不計,此時,δx
*
=-(μi)-1jt
(x
*
)
·
e(x
*
)。
[0031]
一種液體火箭發動機試驗零漂數據處理方法的系統,包括,
[0032]
零漂數據採集模塊,用於獲取液體火箭發動機地面和高空試車試驗的振動加速度數據,並確定振動加速度數據的零漂數據;
[0033]
異常數據處理模塊,用於確定零漂數據的異常數據並對其進行剔除,得到剔除後的零漂數據;
[0034]
bp神經網絡模塊,用於構建bp神經網絡,採用步驟2得到的零漂數據作為樣本數據,並以最小誤差為目標優化bp神經網絡;
[0035]
lmbp神經網絡模塊,用於根據優化的bp神經網絡構建lmbp神經網絡並進行訓練,以未發生零漂的振動加速度數據為標準輸入,訓練後的lmbp神經網絡輸出補償數據,採用補償數據對剔除的異常數據進行補償。
[0036]
與現有技術相比,本發明具有以下有益的技術效果:
[0037]
本發明的一種液體火箭發動機試驗零漂數據處理方法,從補償零位漂移數據、剔除異常數據方面綜合解決零漂問題,應用於液體火箭發動機振動試驗,提高了實驗測量的加速度數據質量,保證後續數據分析。本發明從數據數據驅動層面,在確定採集到的實驗測得的振動加速度數據異常時間段之後,利用levenberg-marquardt算法對bp神經網絡進行優化,並引入標準差法建立3σ-lmbp算法,剔除異常數據並補償異常時間段數據,有效提高數據質量,解決零漂現象問題。
附圖說明
[0038]
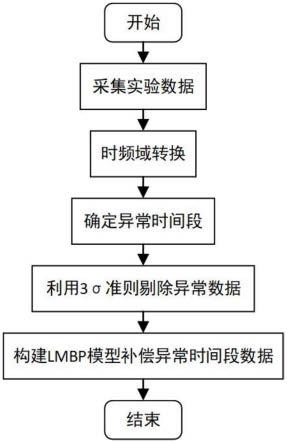
圖1為本發明液體火箭發動機試驗零漂數據處理方法的流程圖;
[0039]
圖2為本發明異常數據剔除的流程圖;
[0040]
圖3為本發明lmbp神經網絡的訓練流程圖。
具體實施方式
[0041]
下面結合附圖對本發明做進一步的詳細說明,所述是對本發明的解釋而不是限定。
[0042]
參閱圖1-3,一種液體火箭發動機試驗零漂數據處理方法,包括以下步驟:
[0043]
步驟1、利用壓電式傳感器,記錄液體火箭發動機地面和高空試車試驗的振動加速度數據,將記錄的數據進行時頻域轉換,以零線為基準線,確定漂離基準線的異常數據段的零漂數據。
[0044]
具體的,利用壓電式加速度傳感器,以25600hz頻率採集振動加速度數據,並按頻率周期依據公式進行時頻域轉換,其中f為採樣頻率,ω為角頻率,並以零線為基準線,將漂離基準線的數據作為零漂數據。
[0045]
步驟2、確定零漂數據的異常數據並對其進行剔除,得到剔除後的零漂數據;
[0046]
利用3σ理論,以σ概率為區間,當各零漂數據的殘餘誤差的絕對值vi》3σ時,將該零漂數據作為異常數據並將其進行剔除。
[0047]
在異常數據剔除中,採用3σ準則剔除異常值,設某一零漂數據的值分別為x1,x2,
…
,xn,算出其算術平均值及剩餘誤差δi=x
i-x0,利用貝塞爾公式計算標準誤差σ,計算公式如下:
[0048][0049]
其中,δi為剩餘誤差,n為樣本個數。
[0050]
當則xi為正常值,予以保留,當則xi為異常值,應予剔除,並採用任一零漂數據所有正常值的均值對該異常值進行替代。
[0051]
步驟3、構建bp神經網絡,採用步驟2得到的零漂數據作為樣本數據,並以最小誤差為目標優化bp神經網絡;
[0052]
採用levenberg-marquardt優化算法,利用剔除異常數據的零漂數據以mine(x
*
)
為目標對權閾值組合解進行修正,優化bp神經網絡。
[0053]
其中,mine(x
*
)為實際輸出和期望輸出的最小差值。
[0054]
bp神經網絡尋優過程實質是求出所求問題的最小誤差對應的解,其數學描述如式(1)所示:
[0055][0056]
其中,x
*
為所求結構為m-p-n神經網絡的權閾值的組合,n1為訓練樣本個數,yk為第k個樣本實際輸出,tk第k個樣本期望輸出。mine(x
*
)為實際輸出和期望輸出的最小差值。
[0057]
步驟4、根據優化的bp網絡構建lmbp神經網絡,以步驟1中未發生零漂的振動加速度數據為標準輸入對lmbp神經網絡進行訓練,訓練後lmbp神經網絡輸出補償數據,採用補償數據對步驟2替代異常數據的零漂數據進行替換。
[0058]
利用levenberg marquardt優化過後的bp神經網絡,同時具有梯度下降尋優和高斯牛頓法的優點,然後採用lmbp算法建立lmbp神經網絡並訓練,lmbp神經網絡設置3層輸入層,5層隱含層,1層輸出層,將未發生零漂的加速度數據集以7:1.5:1.5的比例將其劃分為訓練集、測試集和驗證集。
[0059]
lmbp算法與梯度下降算法使用局部樣本信息修正權閾值的計算過程不同,lmbp算法利用步驟1中所有未發生零漂的振動加速度數據以mine(x
*
)為目標對權閾值組合解進行修正,第k+1次迭代的新解的計算如式(2)所示,權閾值變化量δx
*
的計算如式(3)所示。
[0060][0061]
δx
*
=-(j
t
(x
*
)
·
j(x
*
)+μi)-1jt
(x
*
)
·
e(x
*
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0062]
式中,j(x
*
)為jacobian矩陣,e(x
*
)為第i次迭代網絡結點輸出誤差,i為單位矩陣,μ為比例係數。當μ
→
0時,μi
→
0,忽略不計,δx
*
=-(j
t
(x
*
)
·
j(x
*
))-1jt
(x
*
)
·
e(x
*
),當μ
→
∞時,j
t
(x
*
)
·
j(x
*
)《《μi,忽略不計,此時,δx
*
=-(μi)-1jt
(x
*
)
·
e(x
*
)。
[0063]
實施例1
[0064]
s1:以25600hz記錄現場振動試驗數據,將其保存為txt文件。
[0065]
s2:根據液體火箭發動機現場振動試驗測試採集頻率,將加速度傳感器測得的加速度數據按頻率周期依據公式進行時域轉換,並以零線為基準線,將漂離基準線的數據作為零漂數據。
[0066]
s3:對步驟s2中確定的)零漂數據進行異常值剔除,圖2是數據異常值剔除流程圖。首先,利用3σ準則剔除異常值,當則xi為正常值,予以保留,當則xi為異常值,應予剔除,用某一變量所有正常值的均值代替。
[0067]
s4:構建bp神經網絡,採用步驟2得到的零漂數據作為樣本數據,並以最小誤差為目標優化bp神經網絡;
[0068]
s5:構建lmbp神經網絡,並採用s2中未發生零漂的振動加速度數據作為輸入對
lmbp神經網絡進行訓練,圖3是lmbp的訓練流程圖。首先,讀取數據集,對其進行歸一化處理,以消除量綱差異;其次,將歸一化後的數據按7:1.5:1.5的比例劃分為訓練集、測試集和驗證集;
[0069]
lmbp神經網絡包含三個輸入層、五個隱含層和一個輸出層,學習率設置為0.02,權重和偏差進行隨機初始化,通過訓練集來更新迭代權重和偏差,驗證集來驗證訓練準確度,避免過擬合,測試集評估模型最終訓練結果,最後,通過模型的輸出,進行對剔除數據段進行有效補償。
[0070]
本發明從數據數據驅動層面,在確定採集到的實驗測得的振動加速度數據異常時間段之後,利用levenberg-marquardt算法對bp神經網絡進行優化,並引入標準差法建立3σ-lmbp算法,剔除異常數據並補償異常時間段數據,有效提高數據質量,解決零漂現象問題。
[0071]
以上內容僅為說明本發明的技術思想,不能以此限定本發明的保護範圍,凡是按照本發明提出的技術思想,在技術方案基礎上所做的任何改動,均落入本發明權利要求書的保護範圍之內。