傳感器的校準方法、裝置、計算機設備和可讀存儲介質
2024-04-13 18:37:05 4
1.本技術涉及傳感器技術領域,特別涉及一種傳感器的校準方法、裝置、計算機設備和可讀存儲介質。
背景技術:
2.目前針對空氣汙染監測,傳感器監測方法已經成為傳統精密儀器監測方法的重要補充,其低廉的成本能夠支持傳感器的大規模部署,從而獲得時空解析度更高的空氣汙染信息。然而受器件原理和結構的限制,針對空氣汙染組分的各類傳感器,在實際測量中均會不可避免受到溼度、溫度等環境因素以及非目標組分交叉幹擾的影響。面向空氣汙染監測的傳感器校準,通常分為在部署前校準和部署後校準。其部署前校準通常在實驗室條件下進行,在可提供準確測量值的校準設備幫助下,通過設計不同的環境條件獲取傳感器測量數據,建立校準回歸模型。由於其構造受控的實驗條件(例如指定溫度、溼度、目標組分濃度、幹擾組分濃度等)對於設備的要求較高,尤其是面對多種類型的傳感器以及同種傳感器存在較大的個體差異時,校準模型結構不通用,實施效率較低。於是,部署後校準因其高效便捷得到了廣泛應用。部署後校準是在傳感器實際工況下進行,以相同環境中的標準化設備測量結果作為參照,對比傳感器原始輸出和其他參與校準的輸入變量,進行函數擬合縮小測量誤差。然而,對於傳感器的部署後校準方法而言,全局多元線性回歸模型對於環境因素和幹擾組分的非線性影響刻畫不足,將導致傳感器的測量準確性較低,無法滿足長期穩定的監測需求。因此,有效解決多變量影響下傳感器的部署後校準問題,對於提升傳感器在空氣汙染監測中的準確性有重大意義,將使得傳感器監測方法發揮更大作用。
技術實現要素:
3.本技術的旨在至少一定程度解決現有技術的問題,提供一種傳感器的校準方法、裝置、計算機設備和可讀存儲介質,能夠大幅度提升傳感器的測量準確性,滿足長期穩定的監測需求。
4.本技術實施例的技術方案如下:
5.第一方面,本技術提供了一種傳感器的校準方法,所述方法包括:
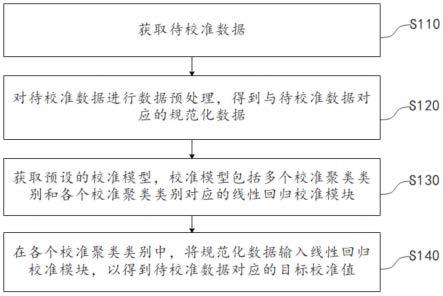
6.獲取待校準數據;
7.對所述待校準數據進行數據預處理,得到與所述待校準數據對應的規範化數據;
8.獲取預設的校準模型,所述校準模型包括多個校準聚類類別和各個所述校準聚類類別對應的線性回歸校準模塊;
9.在各個所述校準聚類類別中,將所述規範化數據輸入所述線性回歸校準模塊,以得到所述待校準數據對應的目標校準值。
10.根據本技術的一些實施例,所述對所述待校準數據進行數據預處理,得到與所述待校準數據對應的規範化數據,包括:
11.對所述待校準數據進行歸一化處理,得到歸一化數據;
12.對所述歸一化數據進行狀態構造處理,得到所述規範化數據。
13.根據本技術的一些實施例,所述對所述歸一化數據進行狀態構造處理,得到所述規範化數據,包括:按照預設的元組規則對所述歸一化數據進行狀態構造處理,得到所述規範化數據。
14.根據本技術的一些實施例,所述校準模型通過以下步驟得到:
15.獲取校準數據集,所述校準數據集包括多個待校準樣本和各個所述待校準樣本對應的測量值;
16.對各個所述待校準樣本進行預處理操作,得到與各個所述待校準樣本對應的規範化樣本;
17.對各個所述規範化樣本進行聚類處理,得到多個所述校準聚類類別;
18.在各個所述校準聚類類別中,根據所述測量值和所述規範化樣本,得到各個所述校準聚類類別對應的所述線性回歸校準模塊;
19.所述校準聚類類別和所述線性回歸校準模塊組成所述校準模型。
20.根據本技術的一些實施例,所述在各個所述校準聚類類別中,根據所述測量值和所述規範化樣本,得到各個所述校準聚類類別對應的所述線性回歸校準模塊,包括:
21.在各個所述校準聚類類別中,對所述測量值和各個規範化樣本進行回歸計算,得到回歸係數;
22.根據所述回歸係數構建得到各個所述校準聚類類別對應的所述線性回歸校準模塊。
23.根據本技術的一些實施例,所述在各個所述校準聚類類別中,將所述規範化數據輸入所述線性回歸校準模塊,以得到所述待校準數據對應的目標校準值,包括:
24.在各個所述校準聚類類別中,將所述規範化數據輸入所述線性回歸校準模塊,得到初始校準值;
25.將所述規範化數據與各個所述校準聚類類別的中心值進行計算處理,得到多個距離值,其中,所述中心值通過對所述校準聚類類別進行算術計算得到;
26.將最小的所述距離值對應的所述初始校準值確定為所述目標校準值。
27.根據本技術的一些實施例,所述對所述待校準數據進行歸一化處理,得到歸一化數據,包括:
28.獲取預設的傳感器的量程上限和預設的傳感器的量程下限;
29.將所述待校準數據與所述量程下限進行差值計算,得到第一差值;
30.將所述量程上限與所述量程下限進行差值計算,得到第二差值;
31.將所述第一差值與所述第二差值的比值作為所述歸一化數據。
32.第二方面,本技術提供了一種傳感器的校準裝置,所述裝置包括:
33.數據獲取模塊,用於獲取待校準數據;
34.預處理模塊,用於對所述待校準數據進行數據預處理,得到與所述待校準數據對應的規範化數據;
35.模型獲取模塊,用於獲取預設的校準模型,所述校準模型包括多個校準聚類類別和各個所述校準聚類類別對應的線性回歸校準模塊;
36.校準處理模塊,用於在各個所述校準聚類類別中,將所述規範化數據輸入所述線
性回歸校準模塊,以得到所述待校準數據對應的目標校準值。
37.第三方面,本技術提供了一種計算機設備,所述計算機設備包括存儲器和處理器,所述存儲器中存儲有計算機可讀指令,所述計算機可讀指令被一個或多個所述處理器執行時,使得一個或多個所述處理器執行如上第一方面描述的任一項所述方法的步驟。
38.第四方面,本技術還提供了一種計算機可讀存儲介質,所述存儲介質可被處理器讀寫,所述存儲介質存儲有計算機可讀指令,所述計算機可讀指令被一個或多個處理器執行時,使得一個或多個處理器執行如上第一方面描述的任一項所述方法的步驟。
39.本技術實施例所提供的技術方案具有如下的有益效果:
40.本技術實施例提出一種傳感器的校準方法、裝置、計算機設備和可讀存儲介質,該傳感器的校準方法首先獲取待校準數據;然後對待校準數據進行數據預處理,得到與待校準數據對應的規範化數據,能夠降低不同輸入變量數值尺度差異的影響;獲取預設的校準模型,校準模型包括多個校準聚類類別和各個校準聚類類別對應的線性回歸校準模塊;在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,以得到待校準數據對應的目標校準值,校準模型能夠對非線性幹擾因素進行補償,從而提高測量性能。與現有技術單純線性模型對於幹擾因素的非線性影響刻畫不足,導致傳感器的測量準確性較低相比,本技術實施例通過對待校準數據進行預處理,利用校準模型對處理得到的規範化數據進行擬合,能夠大幅度改善傳感器的測量性能。
41.本技術的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本技術的實踐了解到。
附圖說明
42.本技術的上述和/或附加的方面和優點從結合下面附圖對實施例的描述中將變得明顯和容易理解,其中:
43.圖1是本技術一個實施例提供的傳感器的校準方法的流程示意圖;
44.圖2是圖1中步驟s120的一個子步驟流程示意圖;
45.圖3是本技術另一個實施例提供的傳感器的校準方法的流程示意圖;
46.圖4是圖3中步驟s240的一個子步驟流程示意圖;
47.圖5是圖1中步驟s140的一個子步驟流程示意圖;
48.圖6是圖2中步驟s121的一個子步驟流程示意圖;
49.圖7是本技術一個實施例提供的傳感器的校準方法的應用場景示意圖;
50.圖8是本技術一個實施例提供的傳感器的校準方法的校準模型構建示意圖;
51.圖9是本技術一個實施例提供的傳感器的校準方法的整體校準流程示意圖;
52.圖10是本技術一個實施例提供的傳感器的校準方法的校準聚類類別可視化示意圖;
53.圖11是本技術一個實施例提供的傳感器的校準方法的在pm
2.5
指標的比較結果示意圖;
54.圖12是本技術一個實施例提供的傳感器的校準方法的在pm
10
指標的比較結果示意圖;
55.圖13是本技術一個實施例提供的傳感器的校準方法的不同數據量比例比較結果
示意圖;
56.圖14是本技術一個實施例提供的傳感器的校準方法的校準聚類類別數量比較結果示意圖;
57.圖15是本技術一個實施例提供的傳感器的校準裝置的結構示意圖;
58.圖16是本技術實施例提供的計算機設備的結構示意圖。
具體實施方式
59.為了使本技術的目的、技術方案及優點更加清楚明白,以下結合附圖及實施例,對本技術進行進一步詳細說明。應當理解,此處所描述的具體實施例僅用以解釋本技術,並不用於限定本技術。
60.需要說明的是,除非另有定義,本文所使用的所有的技術和科學術語與屬於本技術的技術領域的技術人員通常理解的含義相同。本文中所使用的術語只是為了描述本技術實施例的目的,不是旨在限制本技術。
61.相關技術中,校準的基本原理是建立從原始讀數即待校準數據向參考數據逼近的函數關係,原始讀數以及類似溼度等幹擾項作為函數的自變量,最終目標是使得校準模型的輸出結果儘可能逼近環境真實值。但是,由於在實際工況下溼度的變化對傳感器輸出的影響,簡單的非線性模型先驗假設存在較多未知特性,可解釋性差;而類似神經網絡等機器學習類的非線性模型,對於訓練數據量有較高的要求,否則收斂性能和泛化能力難以保證。
62.基於此,本技術實施例提出一種傳感器的校準方法、裝置、計算機設備和可讀存儲介質,該傳感器的校準方法首先獲取待校準數據;然後對待校準數據進行數據預處理,得到與待校準數據對應的規範化數據,能夠降低不同輸入變量數值尺度差異的影響;獲取預設的校準模型,校準模型包括多個校準聚類類別和各個校準聚類類別對應的線性回歸校準模塊;在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,以得到待校準數據對應的目標校準值,校準模型能夠對非線性幹擾因素進行補償,從而提高測量性能。與現有技術單純線性模型對於幹擾因素的非線性影響刻畫不足,導致傳感器的測量準確性較低相比,本技術實施例通過對待校準數據進行預處理,利用校準模型對處理得到的規範化數據進行擬合,能夠大幅度改善傳感器的測量性能,並且具有較好的泛化性,應用較廣泛,以支持大氣環境監測的傳感系統的有效覆蓋監測;並且可對聚類結果進行可視化,提高模型的可解釋性。
63.在一實施例中,傳感器的校準方法可以應用於顆粒物汙染檢測設備,對顆粒物傳感器的測量數據進行校準,使得輸出較為準確的測量值,也可以對其他傳感器的測量數據進行校準,應用範圍廣。如圖7所示,該顆粒物汙染檢測設備集成了顆粒物傳感器、溫溼度傳感器和運算模塊等,提供秒級或分鐘級數據,同時還檢測標準化空氣汙染監測站的數據,具備無線聯網能力,可以發送、接收數據,並支持遠程部署程序。該傳感器的校準方法可以在伺服器端計算實現,之後通過無線網絡,將相關模型和參數部署到監測設備;也可以在監測設備本地完成模型的計算和應用。
64.下面參照附圖,對本技術實施例提供的傳感器的校準方法、裝置、計算機設備和可讀存儲介質,進行說明。
65.參見圖1,圖1示出了本技術實施例提供的傳感器的校準方法的流程示意圖。該傳
感器的校準方法包括但不限於有步驟s110、步驟s120、步驟s130和步驟s140。
66.步驟s110,獲取待校準數據。
67.在一實施例中,目前,顆粒物傳感器作為pm
2.5
或pm
10
汙染監測的重要補充手段,在大氣環境監測的傳感系統中得到廣泛應用。待校準數據可以包括顆粒物傳感器的濃度數據p(pm
2.5
或pm
10
濃度)、溫溼度傳感器的溫度t和相對溼度數據h,還可以為其他大氣檢測的數據,這裡不作贅述。通過記錄顆粒物傳感器、溫度傳感器、溼度傳感器的測量數據,在預設的時間段[t1,t2]內,傳感器(顆粒物,溫度,溼度)的秒級或分鐘級數據求小時平均,得到測量數據,其中,時間段可以是1-3周,也可以是4-8周,還可以為2-3月,能夠進行自定義,為長段連續時間段即可,這裡不作贅述。在上述時間段中,按照小時求取平均值,得到該時間段中的待校準數據。然後利用預設的數據讀取接口讀取記錄的數據,從而獲得待校準數據;或者,直接將顆粒物傳感器、溫度傳感器、溼度傳感器的測量數據利用網絡傳輸至檢測設備,從而獲得待校準數據。通過獲取待校準數據,有利於後續對待校準數據去除幹擾因素,輸出較為準確的測量值。待校準數據可以為一個,也可以為多個,在為多個待校準數據的情況下,可以批次量輸入進行校準處理,也可以為一個個依次輸入進行校準處理。
[0068]
步驟s120,對待校準數據進行數據預處理,得到與待校準數據對應的規範化數據。
[0069]
如圖2所示,對待校準數據進行數據預處理,得到與待校準數據對應的規範化數據,包括但不限於有以下步驟:
[0070]
步驟s121,對待校準數據進行歸一化處理,得到歸一化數據。
[0071]
在一實施例中,首先對待校準數據進行歸一化處理,得到歸一化數據,歸一化處理能夠降低不同輸入變量數值尺度差異的影響,還有利於後續進行聚類計算,增加模型的泛化性。
[0072]
如圖6所示,對待校準數據進行歸一化處理,得到歸一化數據,包括但不限於有以下步驟:
[0073]
步驟s1211,獲取預設的傳感器的量程上限和預設的傳感器的量程下限。
[0074]
在一實施例中,預設的傳感器的量程上限和預設的傳感器的量程下限為傳感器出廠時的額定最大值和最小值,還可以根據需求人工對傳感器的量程進行調節,以滿足實際應用。通過直接讀取傳感器數據的方式得到量程上限和量程下限即可,根據量程上限和量程下限有利於後續對待校準數據進行歸一化處理。
[0075]
步驟s1212,將待校準數據與量程下限進行差值計算,得到第一差值。
[0076]
在一實施例中,根據步驟s1211得到的傳感器的量程下限,利用待校準數據減去傳感器的量程下限,得到第一差值;或者,利用傳感器的量程下限減去待校準數據,然後再求絕對值,得到第一差值,有利於後續利用第一差值得到歸一化數據。示例性地,將待校準數據表示為x,量程下限表示為min,則第一差值表示為c1=x-min;或者c1=|min-x|。
[0077]
步驟s1213,將量程上限與量程下限進行差值計算,得到第二差值。
[0078]
在一實施例中,根據步驟s1211得到的傳感器的量程上限,利用傳感器的量程下限減去傳感器的量程上限,然後再求絕對值,得到第二差值;或者,利用傳感器的量程上限減去傳感器的量程下限,得到第二差值,有利於後續利用第二差值得到歸一化數據。示例性地,量程下限表示為min,量程上限表示為max,則第二差值表示為c2=max-min;或者c2=|min-max|。
[0079]
步驟s1214,將第一差值與第二差值的比值作為歸一化數據。
[0080]
在一實施例中,根據步驟s1212得到的第一差值和步驟s1213得到的第二差值,將第一差值除以第二差值,得到歸一化數據;或者將第二差值除以第一差值,再求倒數,得到歸一化數據。歸一化數據對不同輸入變量數值尺度差異無影響,還有利於後續進行聚類計算,增加模型的泛化性。示例性地,歸一化數據表示為x1,x1=c1/c2=(x-min)/(max-min)。
[0081]
在一實施例中,本技術實施例可以採用步驟s1211至步驟s1214的步驟進行歸一化處理,也可以利用z-score標準化處理方法,還可以利用sigmoid函數處理方法,這裡不作贅述。
[0082]
步驟s122,對歸一化數據進行狀態構造處理,得到規範化數據。
[0083]
在一實施例中,按照預設的元組規則對歸一化數據進行狀態構造處理,即是說,狀態構造形式通過元組的形式表示,構造一階時延項或者更高階時延項,得到規範化數據。示例性地,對歸一化後的濃度p、溫度t和相對溼度h構造狀態三元組,表示形式可以為:xn=(p(n),t(n),h(n)),n表示時刻,構造的一階時延項或者更高階時延項可以表示為:xn=((p(n),p(n-1),t(n),t(n-2),h(n),h(n-1))。隨著檢測時間的推移,規範化數據不會因數據變化產生影響,也不會影響後續的校準計算處理。
[0084]
步驟s130,獲取預設的校準模型,校準模型包括多個校準聚類類別和各個校準聚類類別對應的線性回歸校準模塊;
[0085]
如圖3和圖8所示,校準模型通過以下步驟得到:
[0086]
步驟s210,獲取校準數據集,校準數據集包括多個待校準樣本和各個待校準樣本對應的測量值。
[0087]
在一實施例中,獲取校準數據集,校準數據集包括多個待校準樣本和各個待校準樣本對應的測量值,測量值為傳感器部署附近地區監測站的顆粒物濃度數據y(pm
2.5
或pm
10
濃度)。每一個待校準樣本可以包括顆粒物傳感器的濃度數據p(pm
2.5
或pm
10
濃度)、溫溼度傳感器的溫度t和相對溼度數據h,還可以為其他大氣檢測的數據,這裡不作贅述。通過記錄顆粒物傳感器、溫度傳感器、溼度傳感器的測量數據,在預設的時間段[t1,t2]內,傳感器(顆粒物,溫度,溼度)的秒級或分鐘級數據求小時平均,得到測量數據,其中,時間段可以是1-3周,也可以是4-8周,還可以為2-3月,能夠進行自定義,為長段連續時間段即可,這裡不作贅述。在上述時間段中,按照小時求取平均值,得到該時間段中的待校準樣本。然後利用預設的數據讀取接口讀取記錄的數據,從而獲得待校準樣本;或者,直接將顆粒物傳感器、溫度傳感器、溼度傳感器的測量數據利用網絡傳輸至檢測設備,從而獲得待校準樣本。通過獲取待校準樣本,有利於後續對待校準樣本去除幹擾因素,使得模型能夠輸出較為準確的測量值。
[0088]
步驟s220,對各個待校準樣本進行預處理操作,得到與各個待校準樣本對應的規範化樣本。
[0089]
在一實施例中,首先對待校準樣本進行歸一化處理,得到歸一化數據,歸一化處理能夠降低不同輸入變量數值尺度差異的影響,還有利於後續進行聚類計算,增加模型的泛化性。在進行歸一化處理過程中,先獲取預設的傳感器的量程上限和預設的傳感器的量程下限,利用待校準樣本減去傳感器的量程下限,得到第一差值;或者,利用傳感器的量程下限減去待校準樣本,然後再求絕對值,得到第一差值,有利於後續利用第一差值得到歸一化
數據。再利用傳感器的量程下限減去傳感器的量程上限,然後再求絕對值,得到第二差值;或者,利用傳感器的量程上限減去傳感器的量程下限,得到第二差值,有利於後續利用第二差值得到歸一化數據。最後將第一差值除以第二差值,得到歸一化數據;或者將第二差值除以第一差值,再求倒數,得到歸一化數據。歸一化數據對不同輸入變量數值尺度差異無影響,還有利於後續進行聚類計算,增加模型的泛化性。也可以利用z-score標準化處理方法,還可以利用sigmoid函數處理方法,這裡不作贅述。按照預設的元組規則對歸一化數據進行狀態構造處理,即是說,狀態構造形式通過元組的形式表示,構造一階時延項或者更高階時延項,得到規範化樣本。隨著檢測時間的推移,規範化樣本不會因數據變化產生影響,也不會影響後續的校準計算處理。通過得到與各個待校準樣本對應的規範化樣本能夠降低不同輸入變量數值尺度差異的影響,還有利於後續進行聚類計算,增加模型的泛化性。
[0090]
步驟s230,對各個規範化樣本進行聚類處理,得到多個校準聚類類別。
[0091]
在一實施例中,在得到規範化樣本後,可以採用k-means聚類算法對各個規範化樣本進行聚類處理,得到多個校準聚類類別;也可以採用層次聚類算法對對各個規範化樣本進行聚類處理,得到多個校準聚類類別;還可以採用db-scan聚類算法、fuzzy c-means聚類算法、mean-shift聚類算法進行聚類處理,這裡不作贅述。通過聚類處理能夠有效地提高校準的準確率,從而提升測量準確性。在同一個校準聚類類別中,規範化樣本具有高度相似性;在不同的校準聚類類別中,規範化樣本不同。示例性地,採用k-means聚類算法對各個規範化樣本進行聚類處理,具有n個樣本總數,n可能是成百上千個,得到k個類別,k一般不超過10,一個樣本有且只有一個類別與之對應,選用較小的聚類數便可達到較好的效果,不僅可以減少計算量,而且對計算開銷也有較好的限制。由於k-means聚類算法生成的類別更加均衡,不易出現尺度大小懸殊的類別,降低了誤差,本技術實施例採用k-means聚類算法進行聚類處理。
[0092]
示例性地,利用k-means聚類算法對各個規範化樣本進行聚類處理,得到多個校準聚類類別,並將多個校準聚類類別結果進行可視化,對pm
2.5
檢測的可視化結果,可視化結果如圖10所示,有6個校準聚類類別,增加了模型的可解釋性。
[0093]
步驟s240,在各個校準聚類類別中,根據測量值和規範化樣本,得到各個校準聚類類別對應的線性回歸校準模塊。
[0094]
如圖4所示,在各個校準聚類類別中,根據測量值和規範化樣本,得到各個校準聚類類別對應的線性回歸校準模塊,包括:
[0095]
步驟s241,在各個校準聚類類別中,對測量值和各個規範化樣本進行回歸計算,得到回歸係數。
[0096]
在一實施例中,根據步驟s230得到多個校準聚類類別,在每一個校準聚類類別中,通過測量值和各個規範化樣本計算線性回歸校準函數的係數,可以利用最小二乘法對對測量值和各個規範化樣本進行回歸計算,得到回歸係數,從而有利於後續利用回歸係數構建得到線性回歸校準模塊。
[0097]
步驟s242,根據回歸係數構建得到各個校準聚類類別對應的線性回歸校準模塊。
[0098]
在一實施例中,根據步驟s241得到的回歸係數,構建回歸函數,從而得到線性回歸校準模塊,以對輸入數據進行校準處理,得到真實準確的測量值。示例性地,在每一個校準聚類類別中,規範化樣本表示為:xn=(p(n),t(n),h(n)),測量值表示為yn,將各個xn=(p
(n),t(n),h(n))與yn做多元線性回歸,校準輸出結果形式表示為:
[0099]rn
=a1*p(n)+a2*t(n)+a3*h(n)+a4[0100]
多個類別輸出結果形式可以表示為:
[0101]rn,1
=a
1,1
*p(n)+a
2,1
*t(n)+a
3,1
*h(n)+a
4,1
[0102]rn,2
=a
1,2
*p(n)+a
2,2
*t(n)+a
3,2
*h(n)+a
4,2
[0103]rn,k=a1,k
*p(n)+a
2,k
*t(n)+a
3,k
*h(n)+a
4,k
[0104]
其中,a1、a2、a3和a4為回歸係數,rn為輸出值。模型建立完成,共k個類別,每個類別對應一個多元線性函數,函數的自變量由xn的形式決定。由於不同校準聚類類別中的規範化樣本具有較大的差異,而構建線性回歸校準模塊時,不同規範化樣本可能得到不同的回歸係數,因此,每一個校準聚類類別對應一個線性回歸校準模塊。
[0105]
步驟s250,校準聚類類別和線性回歸校準模塊組成校準模型。
[0106]
在一實施例中,根據上述得到的校準聚類類別和線性回歸校準模塊組成校準模型,能夠利用校準模型對輸入數據進行校準,得到較為準確的測量值。
[0107]
步驟s140,在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,以得到待校準數據對應的目標校準值。
[0108]
如圖5所示,在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,以得到待校準數據對應的目標校準值,包括:
[0109]
步驟s141,在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,得到初始校準值。
[0110]
在一實施例中,根據構建的線性回歸校準模塊,每一個校準聚類類別中對應一個線性回歸校準模塊,對於不同的校準聚類類別,線性回歸校準模塊可能是不同的形式。在各個校準聚類類別中,將將規範化數據輸入線性回歸校準模塊,輸出初始校準值。通過得到初始校準值,有利於後續計算得到目標校準值。規範化數據為構造的一階時延項,示例性地,若xn=(p(n),t(n-1),h(n)),則規範化數據表示為x
t
=(p(t),t(t-1),h(t)),初始校準值表示為r
t,k
,利用線性回歸校準模塊輸出結果表示為:r
t,k
=a
1,k
*p(t)+a
2,k
*t(t-1)+a
3,k
*h(t)+a
4,k
,其中,a1、a2、a3和a4為回歸係數。
[0111]
將上述規範化數據輸入不同校準聚類類別對應的線性回歸校準模塊,線性回歸校準模塊表示為:
[0112]rn,1
=a
1,1
*p(n)+a
2,1
*t(n-1)+a
3,1
*h(n)+a
4,1
[0113]rn,2
=a
1,2
*p(n)+a
2,2
*t(n-1)+a
3,2
*h(n)+a
4,2
[0114]rn,k
=a
1,k
*p(n)+a
2,k
*t(n-1)+a
3,k
*h(n)+a
4,k
。
[0115]
步驟s142,將規範化數據與各個校準聚類類別的中心值進行計算處理,得到多個距離值,其中,中心值通過對校準聚類類別進行算術計算得到。
[0116]
在一實施例中,對於每一個校準聚類類別而言,可以通過對校準聚類類別中的所有規範化樣本求平均值得到中心值;也可以對校準聚類類別中的所有規範化樣本求眾數得到中心值;還可以對校準聚類類別中的所有規範化樣本求中間值得到中心值,在求中間值的過程中,先對所述規範化樣本進行排序處理,可以為升序排序,也可以為降序排序,在規範化樣本為奇數時,直接取中間數值為中心值,在規範化樣本為偶數時,取中間兩位數值的平均值作為中心值。然後將規範化數據與各個校準聚類類別的中心值進行計算處理,得到
多個距離值,根據距離值有利於後續計算得到最佳輸出校準值。其中,可以採用歐式距離對規範化數據與各個校準聚類類別的中心值進行距離計算,得到距離值;也可以採用曼哈頓距離對規範化數據與各個校準聚類類別的中心值進行距離計算,得到距離值;還可以利用其他距離函數,這裡不作贅述。
[0117]
步驟s143,將最小的距離值對應的初始校準值確定為目標校準值。
[0118]
在一實施例中,根據步驟s142得到的多個距離值,選取最小的距離值,根據該最小的距離值對應的校準聚類類別,從而得到在校準聚類類別中線性回歸校準模塊輸出的初始校準值,將該初始校準值作為目標校準值,最終輸出目標校準值。根據上述步驟得到目標校準值,能夠得到更為真實的校準值,從而提高了傳感器的測量性能。
[0119]
其中,最小的距離值表示為:k=arg min dist(x
t
,centerk),k=1,2,.....k
[0120]
目標校準值表示為:r
t
=r
t,k
[0121]
centerk為中心值,x
t
為規範化數據,dist表示歐式距離函數。
[0122]
如圖9所示,本技術實施例獲取待校準數據,待校準數據可以包括顆粒物傳感器的濃度數據p(pm
2.5
或pm
10
濃度)、溫溼度傳感器的溫度t和相對溼度數據h,在預設的時間段[t1,t2]內,傳感器(顆粒物,溫度,溼度)的秒級或分鐘級數據求小時平均,得到測量數據,在上述時間段中,按照小時求取平均值,得到該時間段中的待校準數據。通過獲取待校準數據,有利於後續對待校準數據去除幹擾因素,輸出較為準確的測量值。然後對待校準數據進行歸一化處理,具體表示為(x-min)/(max-min),得到歸一化數據,對歸一化數據進行狀態構造處理,得到規範化數據。在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,得到初始校準值;對於每一個校準聚類類別而言,通過對校準聚類類別中的所有規範化樣本求平均值得到中心值,然後採用歐式距離對規範化與各個校準聚類類別的中心值進行距離計算,得到多個距離值;從多個距離值中選取最小的距離值,根據該最小的距離值對應的校準聚類類別,從而得到在校準聚類類別中線性回歸校準模塊輸出的初始校準值,將該初始校準值作為目標校準值,最終輸出目標校準值。本技術實施例考慮了多源影響因素下形成的函數特性,對於溫溼度等因素對顆粒物傳感器的非線性影響有更好的擬合效果,在實際工況下,數據獲取便捷,不受部署前實驗室校準所需的精密儀器限制,並且選擇距離最近的類別進行校準,具有清晰的可解釋性。
[0123]
如圖11所示,以均方根誤差(root mean square error,rmse)作為誤差評價指標,對於不同水平初始偏差的顆粒物傳感器,在pm
2.5
和pm
10
指標上的校準效果均優於全局多元線性回歸方法。在不同誤差水平的測試組,對於pm
2.5
校準效果提升有16.9%-20.4%。如圖12所示,對於pm
10
校準效果提升大約有9.7%-14.2%。其中,每一組中,從左至右依次為校準前、全局多元線性回歸方法的校準和本技術實施例提供的傳感器的校準方法。
[0124]
如圖13所示,在不同誤差水平的測試組裡,對於增大建模訓練集/測試集的比重對於改善校準性能並不敏感,因此以較小的訓練樣本運行能夠減少計算開銷。如圖14所示,在不同誤差水平的測試組裡,增加聚類數對於校準性能的改善不顯著,因此,在應用時可以選用較小的聚類數,便可達到不錯的效果,可以減少計算量,對計算開銷有較好的限制。
[0125]
在一實施例中,對於穩定性而言,在不同誤差水平的測試組裡,無論是pm
2.5
還是pm
10
指標,相比於全局多元線性回歸,具有更小的校準誤差和更好的穩定性(多次隨機實驗中的誤差波動更小),這也說明對不同狀態類別賦予各自的回歸模型,在擬合細節的刻畫上
有更好的表現,也降低了採樣隨機性的影響。在擬合度指標決定係數上,相比於全局多元線性回歸,具有15.6%(pm
2.5
)和5.7%(pm
10
)的提升。
[0126]
如圖15所示,本技術實施例提供了傳感器的校準裝置100,該傳感器的校準裝置100集成於顆粒物汙染檢測設備中,傳感器的校準裝置100首先通過數據獲取模塊110獲取待校準數據;然後利用預處理模塊120對待校準數據進行數據預處理,得到與待校準數據對應的規範化數據,能夠降低不同輸入變量數值尺度差異的影響;隨後通過模型獲取模塊130獲取預設的校準模型,校準模型包括多個校準聚類類別和各個校準聚類類別對應的線性回歸校準模塊;最後採用校準處理模塊140在各個校準聚類類別中,將規範化數據輸入線性回歸校準模塊,以得到待校準數據對應的目標校準值,校準模型能夠對非線性幹擾因素進行補償,從而提高測量性能。
[0127]
需要說明的是,數據獲取模塊110與預處理模塊120連接,預處理模塊120與模型獲取模塊130連接,模型獲取模塊130與校準處理模塊140連接。上述傳感器的校準方法作用於傳感器的校準裝置100,該傳感器的校準裝置100通過對待校準數據進行預處理,利用校準模型對處理得到的規範化數據進行擬合,能夠大幅度改善傳感器的測量性能,並且具有較好的泛化性,應用較廣泛,以支持大氣環境監測的傳感系統的有效覆蓋監測;並且可對聚類結果進行可視化,提高模型的可解釋性。
[0128]
本技術實施例描述的實施例是為了更加清楚的說明本技術實施例的技術方案,並不構成對於本技術實施例提供的技術方案的限定,本領域技術人員可知,隨著技術的演變和新應用場景的出現,本技術實施例提供的技術方案對於類似的技術問題,同樣適用。
[0129]
圖16示出了本技術實施例提供的計算機設備500。該計算機設備500可以為基站或者終端,該計算機設備500的內部結構包括但不限於:
[0130]
存儲器510,用於存儲程序;
[0131]
處理器520,用於執行存儲器510存儲的程序,當處理器520執行存儲器510存儲的程序時,處理器520用於執行上述的傳感器的校準方法。
[0132]
處理器520和存儲器510可以通過總線或者其他方式連接。
[0133]
存儲器510作為一種非暫態計算機可讀存儲介質,可用於存儲非暫態軟體程序以及非暫態性計算機可執行程序,如本技術任意實施例描述的傳感器的校準方法。處理器520通過運行存儲在存儲器510中的非暫態軟體程序以及指令,從而實現上述的傳感器的校準方法。
[0134]
存儲器510可以包括存儲程序區和存儲數據區,其中,存儲程序區可存儲作業系統、至少一個功能所需要的應用程式;存儲數據區可存儲執行上述的傳感器的校準方法。此外,存儲器510可以包括高速隨機存取存儲器,還可以包括非暫態存儲器,比如至少一個磁碟存儲器件、快閃記憶體器件、或其他非暫態固態存儲器件。在一些實施方式中,存儲器510可選包括相對於處理器520遠程設置的存儲器,這些遠程存儲器可以通過網絡連接至該處理器520。上述網絡的實例包括但不限於網際網路、企業內部網、區域網、移動通信網及其組合。
[0135]
實現上述的傳感器的校準方法所需的非暫態軟體程序以及指令存儲在存儲器510中,當被一個或者多個處理器520執行時,執行本技術任意實施例提供的傳感器的校準方法。
[0136]
本技術實施例還提供了一種計算機可讀存儲介質,存儲有計算機可執行指令,計
算機可執行指令用於執行上述的傳感器的校準方法。
[0137]
在一實施例中,該存儲介質存儲有計算機可執行指令,該計算機可執行指令被一個或多個控制處理器520執行,比如,被上述計算機設備500中的一個處理器520執行,可使得上述一個或多個處理器520執行本技術任意實施例提供的傳感器的校準方法。
[0138]
以上所描述的實施例僅僅是示意性的,其中作為分離部件說明的單元可以是或者也可以不是物理上分開的,即可以位於一個地方,或者也可以分布到多個網絡單元上。可以根據實際的需要選擇其中的部分或者全部模塊來實現本實施例方案的目的。
[0139]
本技術的說明書及上述附圖中的術語「第一」、「第二」、「第三」等(如果存在)是用於區別類似的對象,而不必用於描述特定的順序或先後次序。應該理解這樣使用的數據在適當情況下可以互換,以便這裡描述的本技術的實施例能夠以除了在這裡圖示或描述的那些以外的順序實施。此外,術語「包括」和「具有」以及他們的任何變形,意圖在於覆蓋不排他的包含,例如,包含了一系列步驟或單元的過程、方法、系統、產品或設備不必限於清楚地列出的那些步驟或單元,而是可包括沒有清楚地列出的或對於這些過程、方法、產品或設備固有的其它步驟或單元。
[0140]
應當理解,在本技術中,「至少一個(項)」是指一個或者多個,「多個」是指兩個或兩個以上。「和/或」,用於描述關聯對象的關聯關係,表示可以存在三種關係,例如,「a和/或b」可以表示:只存在a,只存在b以及同時存在a和b三種情況,其中a,b可以是單數或者複數。字符「/」一般表示前後關聯對象是一種「或」的關係。「以下至少一項(個)」或其類似表達,是指這些項中的任意組合,包括單項(個)或複數項(個)的任意組合。例如,a,b或c中的至少一項(個),可以表示:a,b,c,「a和b」,「a和c」,「b和c」,或「a和b和c」,其中a,b,c可以是單個,也可以是多個。
[0141]
本領域普通技術人員可以理解,上文中所公開方法中的全部或某些步驟、系統可以被實施為軟體、固件、硬體及其適當的組合。某些物理組件或所有物理組件可以被實施為由處理器,如中央處理器、數位訊號處理器或微處理器執行的軟體,或者被實施為硬體,或者被實施為集成電路,如專用集成電路。這樣的軟體可以分布在計算機可讀介質上,計算機可讀介質可以包括計算機存儲介質(或非暫時性介質)和通信介質(或暫時性介質)。如本領域普通技術人員公知的,術語計算機存儲介質包括在用於存儲信息(諸如計算機可讀指令、數據結構、程序模塊或其他數據)的任何方法或技術中實施的易失性和非易失性、可移除和不可移除介質。計算機存儲介質包括但不限於ram、rom、eeprom、快閃記憶體或其他存儲器技術、cd-rom、數字多功能盤(dvd)或其他光碟存儲、磁盒、磁帶、磁碟存儲或其他磁存儲裝置、或者可以用於存儲期望的信息並且可以被計算機訪問的任何其他的介質。此外,本領域普通技術人員公知的是,通信介質通常包括計算機可讀指令、數據結構、程序模塊或者諸如載波或其他傳輸機制之類的調製數據信號中的其他數據,並且可包括任何信息遞送介質。
[0142]
以上是對本技術的較佳實施進行了具體說明,但本技術並不局限於上述實施方式,熟悉本領域的技術人員在不違背本技術精神的。共享條件下還可作出種種等同的變形或替換,這些等同的變形或替換均包括在本技術權利要求所限定的範圍內。