耕地遙感圖像分析方法、裝置、設備、存儲介質及產品
2024-04-13 13:54:05 3
1.本發明涉及圖像處理技術領域,尤其涉及一種耕地遙感圖像分析方法、裝置、設備、存儲介質及產品。
背景技術:
2.維護耕地的數量和質量對於糧食生產來說十分重要,而許多地方出現了不同程度的耕地撂荒現象,其會導致土地資源浪費、耕地質量下降的問題。
3.相關技術中,通常需要人為對耕種區域的圖像進行判斷分析,才能確定撂荒的耕地,通常效率較慢且存在一定的誤判率。
4.因此,如何有效檢測撂荒的耕地已經成為業界亟待解決的問題。
技術實現要素:
5.本發明提供一種耕地遙感圖像分析方法、裝置、設備、存儲介質及產品,用以解決現有技術中如何有效檢測撂荒的耕地的缺陷。
6.本發明提供一種耕地遙感圖像分析方法,包括:
7.獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
8.基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
9.將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
10.基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
11.其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
12.根據本發明提供的一種耕地遙感圖像分析方法,在所述得到訓練好的耕地遙感圖像分類模型之後,還包括:
13.將所述當前遙感影像輸入所述訓練好的耕地遙感圖像分類模型,輸出所述當前遙感影像中各個像元的耕地類型;
14.獲取各個像元中耕地類型為裸地類型的目標像元,基於所述當前遙感影像的成像時間和所述目標像元對應地塊的作物輪作信息,確定所述目標像元對應地塊中的撂荒地塊。
15.根據本發明提供的一種耕地遙感圖像分析方法,基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,包括:
16.計算所述當前遙感影像與所述歷史遙感影像集中各個歷史遙感影像的最大均值
差異值信息;
17.確定所述歷史遙感影像集中最大均值差異值信息的權重之和大於第一預設閾值,且影像數量之和小於第二預設閾值的歷史遙感影像子集,其中,所述歷史遙感影像子集中包括n個目標歷史遙感影像。
18.根據本發明提供的一種耕地遙感圖像分析方法,基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型,包括:
19.將一個所述目標歷史遙感影像或者當前遙感目標影像作為一個訓練樣本,獲取多個訓練樣本;
20.利用多個所述訓練樣本對所述預設深度森林模型進行訓練,在滿足預設訓練條件的情況下,停止訓練,得到訓練好的耕地遙感圖像分類模型。
21.根據本發明提供的一種耕地遙感圖像分析方法,所述耕地類型標籤包括:水體類型標籤、人工地物類型標籤、林地類型標籤、作物類型標籤和裸地類型標籤。
22.本發明還提供一種耕地遙感圖像分析裝置,包括:
23.獲取模塊,用於獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
24.確定模塊,用於基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
25.遷移模塊,用於將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
26.訓練模塊,用於基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
27.其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
28.根據本發明提供的一種耕地遙感圖像分析裝置,所述裝置還用於:
29.將所述當前遙感影像輸入所述訓練好的耕地遙感圖像分類模型,輸出所述當前遙感影像中各個像元的耕地類型;
30.獲取各個像元中耕地類型為裸地類型的目標像元,基於所述當前遙感影像的成像時間和所述目標像元對應地塊的作物輪作信息,確定所述目標像元對應地塊中的撂荒地塊。
31.根據本發明提供的一種耕地遙感圖像分析裝置,所述裝置還用於:
32.計算所述當前遙感影像與所述歷史遙感影像集中各個歷史遙感影像的最大均值差異值信息;
33.確定所述歷史遙感影像集中最大均值差異值信息的權重之和大於第一預設閾值,且影像數量之和小於第二預設閾值的歷史遙感影像子集,其中,所述歷史遙感影像子集中包括n個目標歷史遙感影像。
34.根據本發明提供的一種耕地遙感圖像分析裝置,所述裝置還用於:
35.將一個所述目標歷史遙感影像或者當前遙感目標影像作為一個訓練樣本,獲取多個訓練樣本;
36.利用多個所述訓練樣本對所述預設深度森林模型進行訓練,在滿足預設訓練條件的情況下,停止訓練,得到訓練好的耕地遙感圖像分類模型。
37.根據本發明提供的一種耕地遙感圖像分析裝置,所述耕地類型標籤包括:水體類型標籤、人工地物類型標籤、林地類型標籤、作物類型標籤和裸地類型標籤。
38.本發明還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上並可在處理器上運行的電腦程式,所述處理器執行所述程序時實現如上述任一種所述耕地遙感圖像分析方法。
39.本發明還提供一種非暫態計算機可讀存儲介質,其上存儲有電腦程式,該電腦程式被處理器執行時實現如上述任一種所述耕地遙感圖像分析方法。
40.本發明還提供一種電腦程式產品,包括電腦程式,所述電腦程式被處理器執行時實現如上述任一種所述耕地遙感圖像分析方法。
41.本發明提供的耕地遙感圖像分析方法、裝置、設備、存儲介質及產品,通過當前遙感影像從歷史遙感影像集中篩選出特徵分布差異較小的目標歷史遙感影像進行後續模型訓練,進一步通過多源遷移學習的方式,將目標歷史遙感影像中的耕地類型標籤遷移到當前遙感影像中,為新影像賦予標註樣本,從而無需在新影像上人工採集訓練樣本,實現模型訓練和地物分類的自動化,最終根據n個所述目標歷史遙感影像和當前遙感目標影像對預設深度森林模型進行訓練,得到用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類的耕地遙感圖像分類模型,從而自動高效的識別撂荒的耕地。
附圖說明
42.為了更清楚地說明本發明或現有技術中的技術方案,下面將對實施例或現有技術描述中所需要使用的附圖作一簡單地介紹,顯而易見地,下面描述中的附圖是本發明的一些實施例,對於本領域普通技術人員來講,在不付出創造性勞動的前提下,還可以根據這些附圖獲得其他的附圖。
43.圖1為本技術實施例提供的耕地遙感圖像分析方法流程示意圖;
44.圖2為本技術實施例提供的耕地遙感圖像分析主要流程圖;
45.圖3為本技術實施例中撂荒識別流程示意圖;
46.圖4為本技術實施例中所描述的耕地遙感圖像分析裝置結構示意圖;
47.圖5是本發明提供的電子設備的結構示意圖。
具體實施方式
48.為使本發明的目的、技術方案和優點更加清楚,下面將結合本發明中的附圖,對本發明中的技術方案進行清楚、完整地描述,顯然,所描述的實施例是本發明一部分實施例,而不是全部的實施例。基於本發明中的實施例,本領域普通技術人員在沒有作出創造性勞動前提下所獲得的所有其他實施例,都屬於本發明保護的範圍。
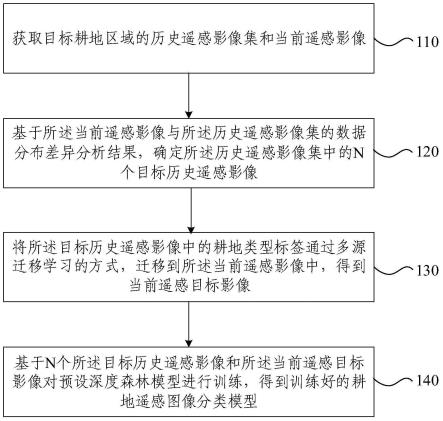
49.圖1為本技術實施例提供的耕地遙感圖像分析方法流程示意圖,如圖1所示,包括:
50.步驟110,獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
51.具體地,本技術實施例中所描述的目標耕地區域具體可以是指需要進行撂荒情況分析的耕地,該目標耕地區域可以根據用戶需求自行設定。
52.本技術實施例中所描述的歷史遙感影像集中可以包含多張目標耕地區域的歷史遙感影像,歷史遙感影像可以是從已經存儲的歷史數據中獲取的。
53.本技術實施例中的當前遙感影像是指最近獲取的目標耕地區域的遙感影像。
54.更具體地,由於不同傳感器獲取的影像的解析度會存在差異,因此在獲取初始的歷史遙感影像集和當前遙感影像後,對其進行空間一致性處理,將數據的空間解析度與歷史影像庫中的進行統一,降低解析度不一致引起的地物判別誤差,最終實現歷史遙感影像集和當前遙感影像的獲取。
55.步驟120,基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
56.更具體地,由於同一個耕地區域積累了不同時期、不同傳感器類型的遙感影像,形成了該地區的歷史遙感影像庫,而在同一類地物在不同影像上的特徵分布會存在一定的差異,因此本技術實施例中可以進一步在歷史傳感影像集中選取與當前遙感影像貼合的目標歷史遙感影像作為訓練樣本。
57.更具體地,本技術實施例中當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果具體可以是當前遙感影像與每個歷史遙感影像進行最大均值差異分析的結果。
58.通過數據分布差異分析結果,可以確定歷史遙感影像集中與當前遙感影像分布差異較低的目標歷史遙感影像。
59.更具體地,本技術實施例中的目標歷史遙感影像中包括多個地塊的遙感影像,每個地塊的遙感影像由至少一個像元組成,且本技術實施例中可以是為每個地塊的遙感影像均標記有耕地類型標籤,即對應的每個像元也會攜帶有耕地類型標籤。
60.本技術實施例中所描述的耕地類型標籤用於標記各個地塊的實際耕地類型。
61.步驟130,將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
62.具體地,多源遷移學習方法提取的遷移知識已不再局限於單個的源領域數據集,而是自於兩個或多個源領域數據集,能夠充分利用已有的多源數據中的信息。遷移學習技術可以有效將經過處理的目標歷史遙感影像中的耕地類型標籤一定程度上遷移至當前遙感影像中,實現對當前遙感影像一定程度上的自動標註。
63.在本技術實施例中,當前遙感影像中信息量較為豐富的部分像元能夠通過遷移學習獲取耕地類型標籤,即經過遷移學習後,當前遙感目標影像中的部分像元已經攜帶了耕地類型標籤,然而當前遙感目標影像仍然存在許多的像元未攜帶耕地類型標籤,無法確定其對應的耕地類型,需要進一步通過後續模型進行進一步分析。
64.採用遷移學習方法中的遷移成分分析(tca)算法,分別根據每一幅歷史遙感影像對當前遙感影像進行遷移學習。
65.步驟140,基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
66.其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
67.具體地,本技術實施例中,深度森林模型具有表徵學習能力強、超參數較少、模型
結構可解釋性強和計算開銷小等特點。
68.在進行多源遷移學習後,基於n個所述目標歷史遙感影像和當前遙感目標影像分別對預設深度森林模型進行訓練,在滿足預設訓練條件後,會停止訓練,得到訓練好的耕地遙感圖像分類模型,該模型可以對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類,進而有效識別目標耕地區域中的撂荒地塊。
69.在本技術實施例中,通過當前遙感影像從歷史遙感影像集中篩選出特徵分布差異較小的目標歷史遙感影像進行後續模型訓練,進一步通過多源遷移學習的方式,將目標歷史遙感影像中的耕地類型標籤遷移到當前遙感影像中,為新影像賦予標註樣本,從而無需在新影像上人工採集訓練樣本,實現模型訓練和地物分類的自動化,最終根據n個所述目標歷史遙感影像和當前遙感目標影像對預設深度森林模型進行訓練,得到用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類的耕地遙感圖像分類模型,從而自動高效的識別撂荒的耕地。
70.可選地,在所述得到訓練好的耕地遙感圖像分類模型之後,還包括:
71.將所述當前遙感影像輸入所述訓練好的耕地遙感圖像分類模型,輸出所述當前遙感影像中各個像元的耕地類型;
72.獲取各個像元中耕地類型為裸地類型的目標像元,基於所述當前遙感影像的成像時間和所述目標像元對應地塊的作物輪作信息,確定所述目標像元對應地塊中的撂荒地塊。
73.具體地,本技術實施例中在獲取當前遙感影像中各個像元的耕地類型後,然後對每一個像元進行多分類結果加權投票,賦予該像元權重最高的類別,從而得到每個地塊的耕地類別。
74.但是,由於耕種受氣候和耕作周期影響很大,有些地塊種植的作物只有在種植期才會種植,而其它時期在遙感影像中反饋的其可能屬於裸地類型,但是這並不代表該地塊真的是裸地。
75.因此,在本技術實施例中,需要進一步結合當前遙感影像的成像時間和所述目標像元對應地塊的作物輪作信息進行判斷。
76.首先,基於地塊作物輪作信息和當前遙感影像的成像時間,確定該地塊的作物是否屬於種植期內。該地塊作物輪作信息具體可以是根據該地塊預先應當種植的作物類型確定的。
77.進一步的,若像元的耕地類型為裸地類型,則需要進一步分析該像元對應的地塊是否處於種植期內,若該像元的地塊處於種植期內,則說明該地塊可能是撂荒地塊,而該像元的地塊處於非種植期內,則說明其很可能不是撂荒地塊。
78.更具體地,若識別到撂荒地塊則將信息上報,進一步人工確認該地塊是否為撂荒地塊。
79.在本技術實施例中,可以通過當前遙感影像的成像時間和目標像元對應地塊的作物輪作信息,進一步對模型輸出的裸地類型的地塊進行二次判斷,有效保證撂荒地塊的識別準確性。
80.可選地,基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,包括:
81.計算所述當前遙感影像與所述歷史遙感影像集中各個歷史遙感影像的最大均值差異值信息;
82.確定所述歷史遙感影像集中最大均值差異值信息的權重之和大於第一預設閾值,且影像數量之和小於第二預設閾值的歷史遙感影像子集,其中,所述歷史遙感影像子集中包括n個目標歷史遙感影像。
83.具體地,本發明中採用最大均值差異(maximum mean discrepancy,mmd)來衡量不同影像間的分布差異,mmd是遷移學習研究中最常用的差異性衡量指標之一,它先將源域數據和目標域數據映射到再生核希爾伯特空間(reproducing kernel hilbert space,rkhs)中,再計算兩組數據的均值的距離。mmd的計算公式為:
[0084][0085]
式中,vmmd代表mmd的值,xs和xt分別代表源域數據和目標域數據;ns和nt分別代表源域數據和目標域數據的數量;ψ(
·
)代表核函數。mmd的值越大說明兩組數據的分布差異越大,當兩組數據的分布完全一致時,mmd的值等於0。
[0086]
首先分別計算歷史遙感影像集中所有影像與當前遙感影像的mmd,然後對所有的mmd進行歸一化,通過自適應動態選取的方式取出一組mmd的權重值之和足夠大且影像數量儘量少的歷史影像,作為目標歷史遙感影像,進而得到歷史遙感影像子集。
[0087]
在本技術實施例中,通過計算所述當前遙感影像與歷史遙感影像集中各個歷史遙感影像的最大均值差異值信息,從而有效從歷史遙感影像集中篩選出於當前遙感影像差異儘可能小的歷史遙感影像作為訓練樣本,能夠有效保證後續訓練的模型能夠更好的識別目標耕地區域當前的耕地類型。
[0088]
可選地,基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型,包括:
[0089]
將一個所述目標歷史遙感影像或者當前遙感目標影像作為一個訓練樣本,獲取多個訓練樣本;
[0090]
利用多個所述訓練樣本對所述預設深度森林模型進行訓練,在滿足預設訓練條件的情況下,停止訓練,得到訓練好的耕地遙感圖像分類模型。
[0091]
具體地,在進行多源遷移學習之後,基於遷移後的目標歷史遙感影像,分別訓練模型,得到訓練好的耕地遙感圖像分類模型。
[0092]
本發明使用深度森林來作為耕地遙感圖像分類模型。
[0093]
深度森林具有表徵學習能力強、超參數較少、模型結構可解釋性強和計算開銷小等特點,雖然深度神經網絡具有強大的性能,但是它存在依賴大量訓練樣本、模型複雜且可解釋性差、超參數較多且調參難度高等缺點。若在合適的學習模型中引入深度神經網絡強大的表徵學習能力,可能會使該模型的性能足以比擬深度神經網絡,同時又能規避上述缺點,因此提出了深度森林(deep forest,df)。df是一種決策樹集成的模型,主要包括多粒度掃描和級聯森林兩個部分,下面將對此進行簡單介紹。
[0094]
多粒度掃描用於增強模型的表徵學習能力。序列數據的多粒度掃描過程如上圖所
示,設輸入的樣本的原始特徵維度等於400,類別數等於3。當採樣窗口的大小為100維、滑動距離為1時,對該樣本進行滑動採樣可以得到301個子樣本,每個子樣本的特徵維度等於100。將一個子樣本輸入隨機森林中,得到3個類別的預測概率,因此301個子樣本輸入2個隨機森林中,總共可以得到301
×3×
2=1806個類預測概率,將這些類預測概率拼接在一起作為樣本的多粒度特徵。此外,使用多個不同大小的採樣窗口來進行多粒度掃描,可以進一步增加多粒度特徵的維度。由於每個子樣本代表了原樣本的局部特徵,因此多粒度掃描相當於對原始特徵進行了結構化上採樣,它增強模型的表徵學習能力,有助於提高模型的性能。
[0095]
深度神經網絡的表徵學習能力主要源自其對原始特徵的逐層處理,受此啟發,級聯森林也由逐層遞進的級聯層組成,如上圖所示。為了增強差異性,每個級聯層使用了兩個完全隨機森林和兩個隨機森林(下文中統稱為隨機森林)。將隨機森林輸出的類預測概率作為樣本的增強特徵,對於一個樣本,當類別數為3時,4個隨機森林可以輸出12個類預測概率作為該樣本的增強特徵,將增強特徵與多粒度特徵拼接在一起作為下一層級聯層的輸入特徵。
[0096]
在級聯森林的每一層級聯層中,訓練樣本被劃分為了生長集和驗證集,生長集用於訓練模型,驗證集用於驗證模型性能,當模型對驗證集的預測精度不再明顯提升時,停止生成新的級聯層。這種方法不僅能夠避免模型過擬合,還可以自適應調整模型的複雜度,使模型可以適應不同尺度的訓練數據。當級聯森林停止生長,將最後一層級聯層中的4個隨機森林對樣本的類預測概率取均值,再將預測概率最高的類別作為樣本的最終預測結果。
[0097]
本技術實施例中所描述的預設訓練條件,具體可以是滿足預設訓練次數,例如訓練滿150次,該預設訓練條件也可以是滿足預設訓練事件,例如訓練滿30分鐘。
[0098]
在本技術實施例中可以通過多個所述訓練樣本對所述預設深度森林模型進行訓練,最終得到對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類的模型,能夠有效幫助識別撂荒地塊。
[0099]
下面對本發明提供的耕地遙感圖像分析裝置進行描述,下文描述的耕地遙感圖像分析裝置與上文描述的耕地遙感圖像分析方法可相互對應參照。
[0100]
可選地,圖2為本技術實施例提供的耕地遙感圖像分析主要流程圖,如圖2所示,包括:
[0101]
由於不同傳感器獲取的影像的解析度會存在差異,因此首先對輸入影像進行空間一致性處理,將數據的空間解析度與歷史遙感影像數據集中數據的進行統一,降低解析度不一致引起的地物判別誤差。
[0102]
同一類地物在不同影像上的特徵分布會存在一定的差異,在遷移學習中將這些差異稱為領域間的分布差異。領域間分布的差異會影響遷移學習的效果,當兩個領域的差異越小時,兩個領域之間越容易進行知識的遷移。
[0103]
由於同一個區域積累了不同時期、不同傳感器類型的遙感影像,形成了該地區的歷史源域遙感影像庫,需要根據數據分布差異從歷史源域遙感影像庫中選取一組最適合的源域影像集,得到低差異歷史遙感影像集。
[0104]
根據低差異歷史遙感影像集和輸入遙感影像進行多源遷移學習,然後根據遷移後當前遙感目標影像和低差異歷史遙感影像集進行模型訓練,在模型訓練過程中使用的是深度深林模型,在完成模型訓練後,得到訓練好的耕地遙感圖像分類模型,可以進一步根據該
分類模型對輸入遙感影像中的各個像元進行分析,結合耕地圖斑,提取耕地範圍內未種植區域,然後結合該地區作物物候信息,提取撂荒耕地。
[0105]
圖3為本技術實施例中撂荒識別流程示意圖,如圖3所示,根據當前遙感影像的影像成像時間和地塊作物輪作信息確定當前地塊是否種植期,若該地塊處於種植期,則結合地塊類別信息確定是否有作物種植,若無作物種植,則判斷其疑似撂荒。
[0106]
圖4為本技術實施例中所描述的耕地遙感圖像分析裝置結構示意圖,如圖4所示,包括:獲取模塊410、確定模塊420、遷移模塊430和訓練模塊440;
[0107]
其中,獲取模塊410用於獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
[0108]
其中,確定模塊420用於基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
[0109]
其中,遷移模塊430用於將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
[0110]
其中,訓練模塊440用於基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
[0111]
其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
[0112]
可選地,所述裝置還用於:
[0113]
將所述當前遙感影像輸入所述訓練好的耕地遙感圖像分類模型,輸出所述當前遙感影像中各個像元的耕地類型;
[0114]
獲取各個像元中耕地類型為裸地類型的目標像元,基於所述當前遙感影像的成像時間和所述目標像元對應地塊的作物輪作信息,確定所述目標像元對應地塊中的撂荒地塊。
[0115]
可選地,所述裝置還用於:
[0116]
計算所述當前遙感影像與所述歷史遙感影像集中各個歷史遙感影像的最大均值差異值信息;
[0117]
確定所述歷史遙感影像集中最大均值差異值信息的權重之和大於第一預設閾值,且影像數量之和小於第二預設閾值的歷史遙感影像子集,其中,所述歷史遙感影像子集中包括n個目標歷史遙感影像。
[0118]
可選地,所述裝置還用於:
[0119]
將一個所述目標歷史遙感影像或者當前遙感目標影像作為一個訓練樣本,獲取多個訓練樣本;
[0120]
利用多個所述訓練樣本對所述預設深度森林模型進行訓練,在滿足預設訓練條件的情況下,停止訓練,得到訓練好的耕地遙感圖像分類模型。
[0121]
可選地,所述耕地類型標籤包括:水體類型標籤、人工地物類型標籤、林地類型標籤、作物類型標籤和裸地類型標籤。
[0122]
在本技術實施例中,通過當前遙感影像從歷史遙感影像集中篩選出特徵分布差異較小的目標歷史遙感影像進行後續模型訓練,進一步通過多源遷移學習的方式,將目標歷史遙感影像中的耕地類型標籤遷移到當前遙感影像中,為新影像賦予標註樣本,從而無需
在新影像上人工採集訓練樣本,實現模型訓練和地物分類的自動化,最終根據n個所述目標歷史遙感影像和當前遙感目標影像對預設深度森林模型進行訓練,得到用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類的耕地遙感圖像分類模型,從而自動高效的識別撂荒的耕地。
[0123]
圖5是本發明提供的電子設備的結構示意圖,如圖5所示,該電子設備可以包括:處理器(processor)510、通信接口(communications interface)520、存儲器(memory)530和通信總線540,其中,處理器510,通信接口520,存儲器530通過通信總線540完成相互間的通信。處理器510可以調用存儲器530中的邏輯指令,以執行耕地遙感圖像分析方法,該方法包括:獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
[0124]
基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
[0125]
將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
[0126]
基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
[0127]
其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
[0128]
此外,上述的存儲器530中的邏輯指令可以通過軟體功能單元的形式實現並作為獨立的產品銷售或使用時,可以存儲在一個計算機可讀取存儲介質中。基於這樣的理解,本發明的技術方案本質上或者說對現有技術做出貢獻的部分或者該技術方案的部分可以以軟體產品的形式體現出來,該計算機軟體產品存儲在一個存儲介質中,包括若干指令用以使得一臺計算機設備(可以是個人計算機,伺服器,或者網絡設備等)執行本發明各個實施例所述方法的全部或部分步驟。而前述的存儲介質包括:u盤、移動硬碟、只讀存儲器(rom,read-only memory)、隨機存取存儲器(ram,random access memory)、磁碟或者光碟等各種可以存儲程序代碼的介質。
[0129]
另一方面,本發明還提供一種電腦程式產品,所述電腦程式產品包括電腦程式,電腦程式可存儲在非暫態計算機可讀存儲介質上,所述電腦程式被處理器執行時,計算機能夠執行上述各方法所提供的耕地遙感圖像分析方法,該方法包括:獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
[0130]
基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
[0131]
將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
[0132]
基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
[0133]
其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
[0134]
又一方面,本發明還提供一種非暫態計算機可讀存儲介質,其上存儲有電腦程式,該電腦程式被處理器執行時實現以執行上述各方法提供的耕地遙感圖像分析方法,該方法包括:獲取目標耕地區域的歷史遙感影像集和當前遙感影像;
[0135]
基於所述當前遙感影像與所述歷史遙感影像集的數據分布差異分析結果,確定所述歷史遙感影像集中的n個目標歷史遙感影像,其中,所述目標歷史遙感影像中的每個像元均對應一個耕地類型標籤,n為正整數;
[0136]
將所述目標歷史遙感影像中的耕地類型標籤通過多源遷移學習的方式,遷移到所述當前遙感影像中,得到當前遙感目標影像;
[0137]
基於n個所述目標歷史遙感影像和所述當前遙感目標影像對預設深度森林模型進行訓練,得到訓練好的耕地遙感圖像分類模型;
[0138]
其中,所述耕地遙感圖像分類模型用於對所述目標耕地區域的遙感影像中各個像元的耕地類型進行分類。
[0139]
以上所描述的裝置實施例僅僅是示意性的,其中所述作為分離部件說明的單元可以是或者也可以不是物理上分開的,作為單元顯示的部件可以是或者也可以不是物理單元,即可以位於一個地方,或者也可以分布到多個網絡單元上。可以根據實際的需要選擇其中的部分或者全部模塊來實現本實施例方案的目的。本領域普通技術人員在不付出創造性的勞動的情況下,即可以理解並實施。
[0140]
通過以上的實施方式的描述,本領域的技術人員可以清楚地了解到各實施方式可藉助軟體加必需的通用硬體平臺的方式來實現,當然也可以通過硬體。基於這樣的理解,上述技術方案本質上或者說對現有技術做出貢獻的部分可以以軟體產品的形式體現出來,該計算機軟體產品可以存儲在計算機可讀存儲介質中,如rom/ram、磁碟、光碟等,包括若干指令用以使得一臺計算機設備(可以是個人計算機,伺服器,或者網絡設備等)執行各個實施例或者實施例的某些部分所述的方法。
[0141]
最後應說明的是:以上實施例僅用以說明本發明的技術方案,而非對其限制;儘管參照前述實施例對本發明進行了詳細的說明,本領域的普通技術人員應當理解:其依然可以對前述各實施例所記載的技術方案進行修改,或者對其中部分技術特徵進行等同替換;而這些修改或者替換,並不使相應技術方案的本質脫離本發明各實施例技術方案的精神和範圍。