拼智商 米家/科沃斯/iRobot掃地機對比
2025-06-10 20:20:11 2
上周,小米米家發布了他們與生態鏈企業石頭科技共同推出的掃地機器人,發布會上,小米公關團隊肯定少不了給網友安利掃地機器人的各種高大上配置,即便它沒法跑分。對於一個全新品牌而言,小米不僅告訴網友米家掃地機器人有多麼優秀,在動輒5-6000元的好品牌面前,小米依舊敢毫無遮掩的秀優越,而且還是以1699元定位的他們的第一臺掃地機器人去對抗行業巨頭,那麼小米到底吹NB了嗎?

選擇掃地機器人有兩大最為核心的體驗需要參考,路徑規劃能力和清掃的性能。前者決定了它的工作效率,甚至是智商;而後者,它決定了是否能夠把地掃乾淨。今天,我們將從一個層面為你揭曉答案,下周還有清掃能力的對比帶給大家。
----米家/iRobot/科沃斯參測機型簡介----

首先我們簡要介紹一下今天的三個主角,米家掃地機器人,小米智能家居米家品牌的第一款該類型的產品。儘管是行業裡面新面孔,米家掃地機器人卻已經使用上了最新的路徑規劃技術,它由雷射測距傳感器結合複雜的算法完成,是目前掃地機器人行業裡少數高端產品才能搭載的技術。

除了美國品牌Neato外,國內的銷量之王科沃斯也是少數掌握雷射測距傳感器加軟體算法的掃地機器人品牌,科沃斯地寶9系目前有兩款產品具備這項技術。不過因為沒有找到評測機的緣故,我們使用了一臺UNIBOT管家機器人替代。它的「底層」是一臺支持雷射傳感並計算路徑的掃地機器人,只不過比地寶9系額外多設計了擴展接口,可以聯接智能攝像頭或空氣淨化模塊增強功能。
對比中的iRobot機型則是剛剛發布的980型,它是iRobot第一臺能夠規劃路徑的掃地機器人,可見這個技術還是非常新的。與前兩臺掃地機器人不同,iRobot用攝像頭代替了前兩者的雷射傳感器,配合類似的地圖繪測算法達到路徑規劃的功能。從理論上來說,攝像頭探測會受到空間、視野等條件的限制(攝像頭還是在機身頂部斜向上取景),不如雷射傳感器能夠在原地探測到與周圍障礙物的距離。
道理言簡意賅的說就是這麼多,上述三臺掃地機器人與我們以前所買到的絕大部分四處亂轉的掃地機器人擁有天壤之別,誇張的說就是在陌生城市開車有和沒有導航的區別。
理論講完了,我們直接看結果吧,三款掃地機器人誰的路徑規劃能力更好?
----清掃用時 米家<iRobot<科沃斯----
在我們20平米左右的測試環境中,三臺掃地機器人清掃一遍的時間分別是米家掃地機器人14分鐘、iRobot980用16分鐘,科沃斯UNIBOT用時18分鐘,從效率上講,米家無疑是最高的。

測試環境,20平米左右
為什麼米家清掃的最快?更深層的原因肯定不是我們通過猜測臆想的,不過從三者的測試體驗中我們也能看到一些工作方式的差異。先說米家掃地機器人,它給人的感覺是地圖構建的非常迅速,從視頻中我們能看到,在點擊了開始清掃之後,米家掃地機器人原地轉上一圈就開始打掃房間了,手機APP中能看到更清晰地結果。不到1分鐘的時間裡,米家掃地機器人已經高效率的將室內地圖繪測完畢,桌椅腿都沒有落下,而且它是在充電底座附近完成地圖繪測的。
iRobot 980呢?這臺掃地機器人的APP端並不會為你顯示它的地圖繪測數據,只有清掃按鍵而已。然而,即便是採用了攝像頭識別室內場景,但其實它開始清掃房間比誰都早。以清掃視頻來看,剛剛開始遠程輸入清掃任務後,掃地機就徑直的向前移動了,以房間正中為起點先將半個房間做全覆蓋的清掃。當清掃完充電底座下方的半個房間後,攝像頭和掃地機算法指引它去另外半個房間做同樣的類似於「弓」字型的運動。
論清掃時間來說,其實科沃斯UNIBOT與比米家掃地機器人還稍微快一些,然而在整個的單次清掃任務裡,UNIBOT卻成為用時最長的一臺,這是因為它被地圖繪測的過程大大拖延了效率。從視頻中不難看出,UNIBOT在整個清掃任務中有非常明顯的2段工作,開始的5分多種時間裡,它在房間內不規則的行走探測室內環境(似乎在椅子腿處還有點被困住的感覺),而不是像米家掃地機器人那樣在原地快速繪測地圖,所以它的地圖構建時間相當的長。而且,對比能夠顯示地圖的科沃斯UNIBOT與米家掃地機器人,後者在遠離房間桌椅障礙物的情況下就可以將他們識別,而走到椅子底下建地圖的科沃斯UNIBOT可沒展示出這個特性,甚至清掃完成後也沒有讓人看出地圖上有椅子阻擋。
米家/iRobot/科沃斯APP中的清掃界面和地圖數據(iRobot不顯示地圖)
科沃斯UNIBOT的第二段工作是清掃,在18分半的整個工作流程中去除頭5分半,相當於13分鐘就完成了整屋清潔,所以在掃地這件事上科沃斯UNIBOT被低效率且精度不高的地圖繪測拖了後腿。
----局域清掃 米家路徑規劃更理性----
單純比拼誰幹活更快並不能看出路徑規劃的「智商」,為此我們截取三個掃地機重點清掃茶几的這部分工作狀態來看看他們的差別。
從米家掃地機器人的視頻中能夠明顯感知到,掃地機似乎知道房間內有一種叫做茶几的家具,它在繞圈清掃了左上角茶几腿後進入了重點清掃這個區域的動作,對茶几底部精確地「弓」字行進讓人看出了理性路徑規劃的一面。可能有人會說,左下和右側的兩個茶几腿沒有清理啊,但翻開它的清掃全流程視頻會發現,清掃室內最底部的黃色木椅式左下茶几腿已經清掃了,而在最開始圍著房間做口字形打掃時,右側的兩個茶几腿也已經完全打掃一遍了。有沒有一種感覺是米家掃地機知道這三個茶几腿在之前打掃過?
iRobot在清掃茶几這裡的時候又展示了一些它「隨機清掃」式路徑規劃的特性,可以看出整段視頻都是在打掃這個區域,但是偶爾它會走出茶几底部,甚至更遠的時候已經走到了床邊,這樣的工作模式很難讓人判斷哪裡掃過哪裡被遺漏。在路徑進行時,iRobot 980沒有了之前的「弓」字形規劃,視頻中它對椅子腿的繞樁清掃更加偏愛,這是因為之前的「弓」型清掃時已經橫向清理過茶几底部一部分空間。
科沃斯UNIBOT的行進方式與米家比較相似,它們都是縱向「弓」字清理房間的,然而你會看到在視頻剛開始它徑直穿過茶几走向沙發之後,這種「弓」字完全被沙發、茶几腿這些障礙物打破,當遇到障礙之後,似乎科沃斯UNIBOT的注意力就被分散了,於是它碰到茶几腿後在沒有完全繞樁清掃的情況下從茶几外側又進入了這個區域。之後有一個小段清掃時有些類似「弓」型行走的跡象,然而它總是能在碰到茶几腿時死啃茶几腿,但又不在像iRobot和米家那樣完整的把茶几腿單次清掃一遍,有些難以捉摸。
或許每一個掃地機都在完整的10多分鐘清掃時把茶几區域絕大部分空間打掃了一遍,然而在上面這三段重點清理該區域的視頻中,米家對環境掌控和行進規劃的能力是高於另外兩臺的,至少它的行走方式是可以被我們人類所理解的。其實從他們繞樁時檢測茶几腿邊界的時候就能看出,誰更躊躇、誰需要不斷地碰撞檢測茶几腿存在,誰更貼近茶几腿邊界清掃,這些細節中都能判斷三臺掃地機器人路徑規劃的智商。
----清掃覆蓋度對比----
各位應該看到,測試路徑規劃時我在房間中黃色椅子的底部、茶几前以及花盆旁的牆壁踢腳處撒了一些麵粉,這些檢測點是為了查看它們是對障礙物周邊、以及延邊清掃的範圍,茶几前的麵粉則是為了查看它們在「弓」字行走時能否將這狹長的麵粉區域全部覆蓋。
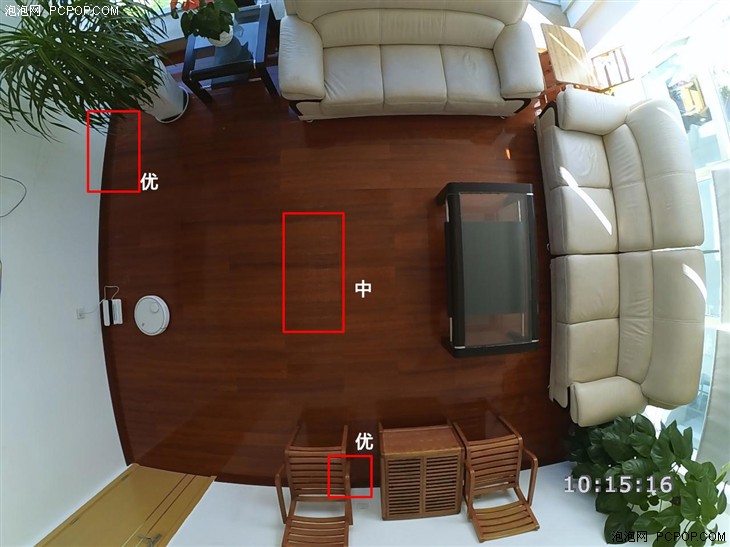
米家掃地機清掃結果
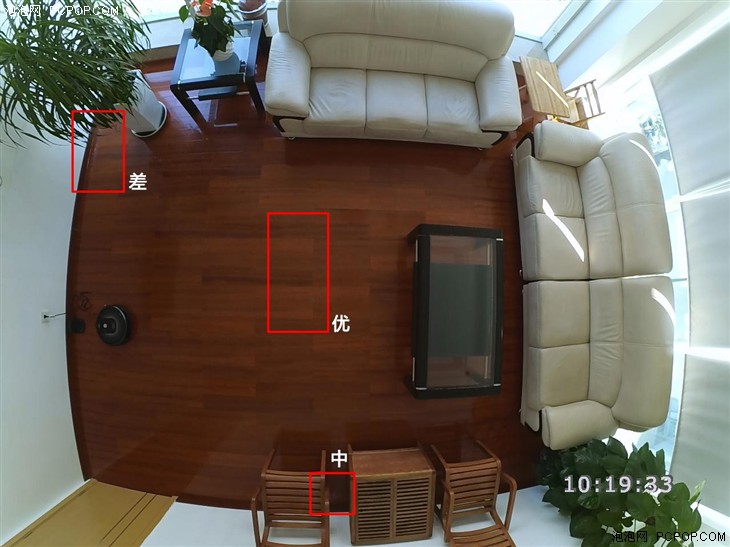
iRobot980清掃結果
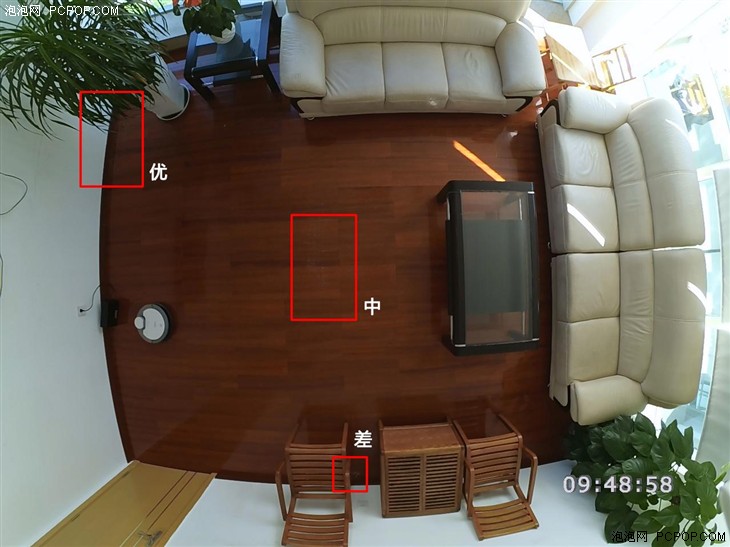
科沃斯UNIBOT清掃結果
因為視頻角度和清晰度的關係,即便原片的截圖也無法特別清晰的展示它們的最終清掃效果,但可以看出,米家中心區域有些殘留,牆角和椅子腿處比較乾淨;iRobot 980牆邊殘留比較明顯,中心非常乾淨,右下角椅子腿有比較模糊的殘留跡象;科沃斯UNIBOT的沿牆效果不錯,中部有殘留,椅子腿處的殘留更明顯一些。
相比而言,論覆蓋區域的全面與否,米家掃地機器人應該體現出了一些優勢,至少三個區域都沒有完全不被清理的麵粉殘留,另外兩臺或多或少都有我之前撒放的點狀麵粉塊。
整個測試下來大家應該能夠看出三臺掃地機路徑規劃的能力,最直觀的數據是米家掃地機器人清掃時間更短、而且路徑與人類思維比較像,最後相對模糊一些的視頻截圖中也能體現出一些覆蓋範圍的優勢。我覺得這樣就足夠了,測試歸測試,在1699元米家掃地機器人、3999元科沃斯UNIBOT以及5999元水貨iRobot 980之間,即便性能相近都有米家的絕對優勢,更何況它的路徑規劃表現真的非常成熟。至於清掃的潔淨度呢?請期待我們下一篇的測試。■








