同樣是規劃式掃地機器人 它們到底有啥區別?
2025-01-31 18:23:10 2
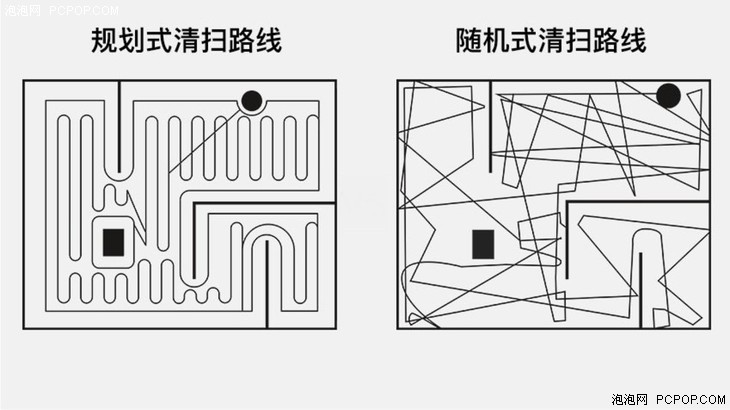
對掃地機器人稍有了解的人都知道它有隨機式和規劃式兩種類型,很好理解,隨機式掃地機器人在掃地的時候沒什麼規律,碰撞到障礙物後才開始改變清掃路徑,心急的人看不得根本看不得它幹活,眼看著垃圾在那兒,它就是不過去;和它形成鮮明反差的是規劃式掃地機器人,它不像隨機式掃地機器人那麼盲目,該怎麼幹活心裡有數。
現在越來越多的掃地機器人都是規劃式的了,不過同樣都是規劃式,它們之間的區別還是挺大的。
對於規劃式掃地機器人來說,需要解決我在哪、我要去什麼地方、我要怎麼去等問題,這就要用到SLAM(Simultaneous Localization and Mapping)即定位及地圖構建技術,實現SLAM既可以用雷射雷達技術,也可以用視覺技術,或者是慣性導航。
慣性導航依靠陀螺儀、加速度計等慣性傳感器獲取位置、速度等信息,廣泛應用於飛機、飛彈、艦船、潛艇、坦克等國防領域,不過隨著成本的降低和需求的增長,逐步擴展到掃地機器人等商用領域。
受慣性導航裝置的精度影響,慣性導航過程存在誤差,而且隨著時間的推移,誤差會不斷積累,在面積較大的複雜地面環境,慣性導航的弊端會逐漸顯現出來,不能很好勝任規劃式清掃任務。

基於雷射雷達的SLAM依靠雷射測距傳感器對房間進行掃描,當雷射投射到障礙物上時,會形成光斑,圖像傳感器會根據光斑的像素序號來計算到雷射測距傳感器的中心距離,再結合掃地機器人自身的算法,構建房間地圖,並實時定位清掃。
雷射SLAM代表機型有Neato、米家/石頭等。
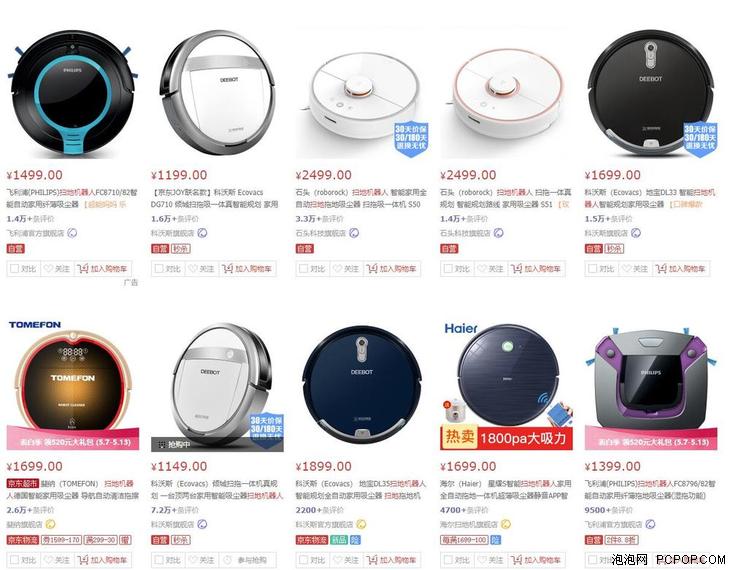
在電商平臺以「規劃式」進行篩選,先不說亂入其中的隨機碰撞式機型,很多以「路徑規劃」為賣點的機器價格並不貴,它們用的一般都是慣性導航,通過陀螺儀、加速度計等慣性傳感器進行路徑規劃。
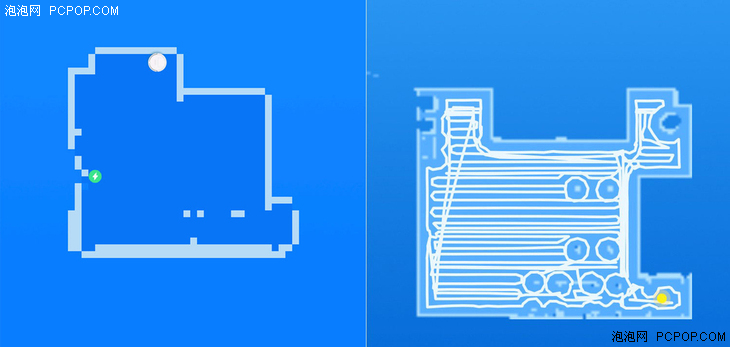
左為慣性導航,右為雷射導航
雖然都有繪製地圖的能力,但最終繪製出來的地圖有明顯的差別,採用慣性導航的掃地機器人繪製的地圖更簡單初級一些,沒有詳細的運動軌跡路線,甚至只有到了最後才勉強能看出家居戶型圖。
另外要說的是,有些機器雖然也配置了雷射傳感器,但實際用下來會發現它的路徑規劃還是依靠慣性導航,所以最終畫出來的地圖精度不高,和上面採用慣性導航機器繪製的地圖差不多,並沒有充分發揮雷射導航技術的優勢。

視覺導航也叫vSLAM,掃地機器人上會有一個攝像頭,和雷射SLAM類似,通過收集到的點雲數據計算障礙物距離,然後基於單目、魚眼相機的vSLAM方案,利用多幀圖像來估計自身的位姿變化,再通過累計位姿變化來計算距離物體的距離,並進行定位與地圖構建。
vSLAM代表機型有iRobot 980、戴森360 Eye,價格都不便宜,而國內也有2000元以下的機型,但攝像頭應該只是起到輔助定位的作用,主要還是靠慣性導航。

雖然規劃式掃地機人有種種優點,但也別小瞧了隨機碰撞式,要知道iRobot只有9系等高端型號是規劃式,其它都是隨機碰撞式,依靠先進合理的算法依然能獲得最有效的清潔率和覆蓋率,適合在小空間環境使用。
另外即使是採用了相同的定位導航技術,算法技術對清掃結果也有直接的影響。最後想說的是,掃地機器人還是一個比較年輕的行業,技術積累還需要時間,所以需要不斷用固件升級的方式提高整體的算法能力。
本文編輯:李伏勝
關注泡泡網,暢享科技生活。








